Někdy mi připadá, že krokový motor je obestřen tajemstvím, protože je spousta lidí, kteří nevědí jak tento velice jednoduchý motor se spoustou drátů funguje. Problém je, že motor musí mít nějakou ovládací elektroniku. Prostým připojením na napájecí napětí se motor neroztočí, maximálně se pohne o jeden krok. Výše uvedené věty tak nějak už neplatí. S Arduinem, všemožnými drivery pro krokové motory a 3D tiskárnami točí s krokáčem kde-kdo. Ale i tak si můžete tento článek přečíst. Snad tu naleznete alespoň nějaké užitečné informace.

Krokový motor je synchronní motor (rotor se točí stejnou rychlostí jako točivé magnetické pole ve statoru). Točivé magnetické pole ale není vytvářeno střídavým proudem, ale postupným zapínáním jednotlivých cívek statoru.
- Stator motoru se skládá z několika dvojic cívek (obvykle 4 dvojice), které mohou být různě zapojeny (vyvedeny obě strany cívky, dvě a dvě cívky spojeny jednou stranou vinutí, všechny cívky se společnou jednou stranou, sériově, paralelně, …).
- Rotor je váleček buď z magneticky měkkého, nebo tvrdého materiálu s vyniklými póly.

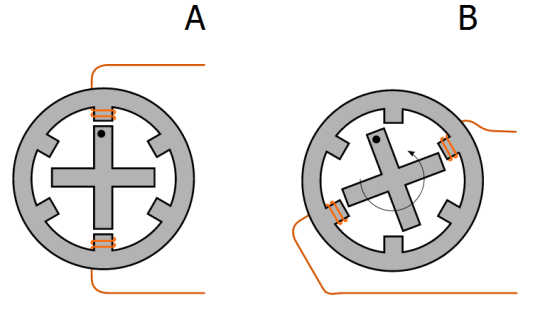
Princip je zachycen na obrázku výše. Stator má tři pólové dvojice. Rotor čtyři vyniklé póly.
Poloha A
- Motor je v první poloze, protože proud tekoucí cívkami způsobuje magnetický tok, který prochází místem s nejnižším magnetickým odporem – rotorem.
- Ostatními cívkami neprotéká žádný proud!
Poloha B
- Přepnutím aktivní cívky se vytvoří magnetický tok na jiném místě. Rotor se tedy natočí tak, aby kladl co nejnižší magnetický odpor, tedy o 60° doleva.
Rychlým a postupným přepínáním jednotlivých dvojic cívek se zajistí rotace rotoru. Motor lze ovládat různými druhy řízení, lze například:
- Aktivovat vždy dvě sousední cívky – rotor se tedy natočí mezi dva pólové nástavce statoru (dvě aktivní cívky způsobí téměř dvojnásobný točivý moment).
- Pokud je rotor z magneticky tvrdého materiálu (magnetický) může jedna cívka tlačit, druhá táhnout – každá je jinak polarizovaná.
- Počet kroků motoru lze zdvojnásobit spínáním vždy jedné cívky (obr. A), poté dvojice cívek (rotor se natočí mezi dva póly) a poté zase jedné cívky (obr. B). Počet kroků je možné i zvýšit (mikrokrokování) postupným zapínáním jednotlivých cívek – motor pak má hladší chod. Toho se využívá velmi často.
- Pokud se cívky přepínají moc rychle, projevuje se tzv. ztráta kroku. Točivé magnetické pole „ujede“ rotoru, který se nedokáže tak rychle otočit. Ztráta kroku může nastat taky při velkém mechanickém zatížení (motor nedokáže zátěž utočit) motoru.

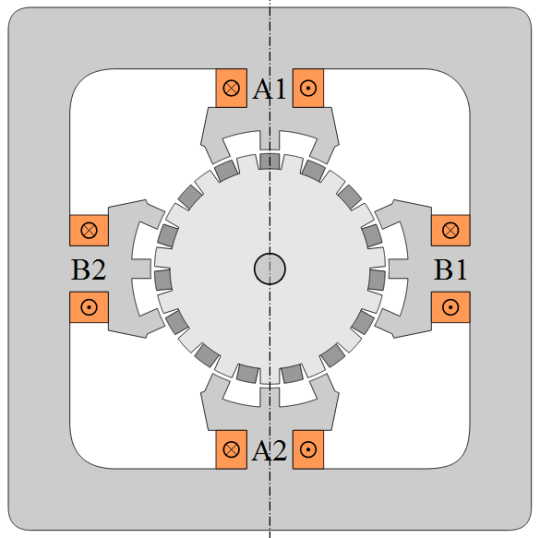
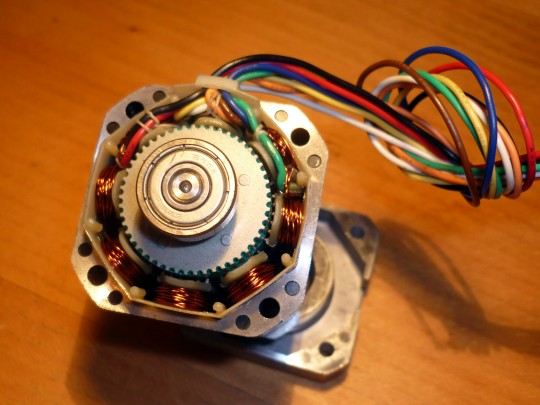
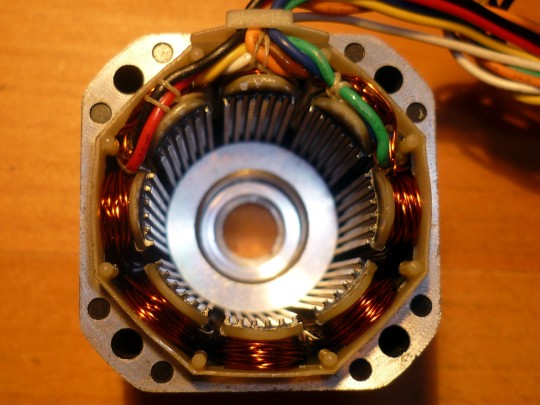
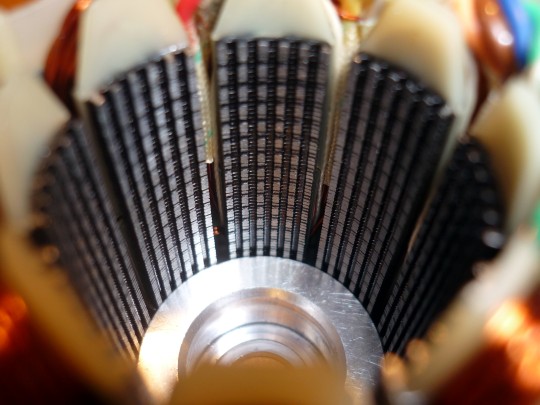
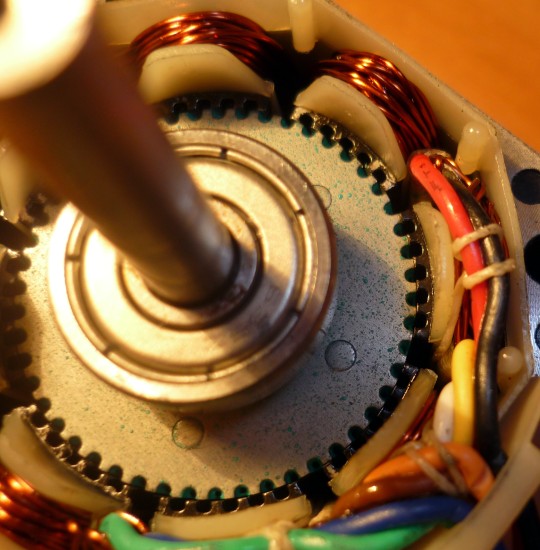
Na obrázku výše je „reálná“ mechanická konstrukce dvoupólového krokového motoru. Na rotoru je 30 vyniklých pólů (rozmístěných po 12°), na statoru 2 pólové dvojice, každá se třemi vyniklými póly.
Proud prochází cívkami A1 a A2, rotor je tedy natočen tak, aby byla vzduchová mezera co nejmenší (malý magnetický odpor). Připojením napětí na cívky B1 a B2 se rotor opět otočí do polohy s nejnižším magnetickým odporem, tedy o polovinu pólových nástavců rotoru, tedy o 6°. Rotor je tvořen magnetickým materiálem, záleží tedy na polaritě připojeného napětí, jakým směrem se bude rotor pohybovat.

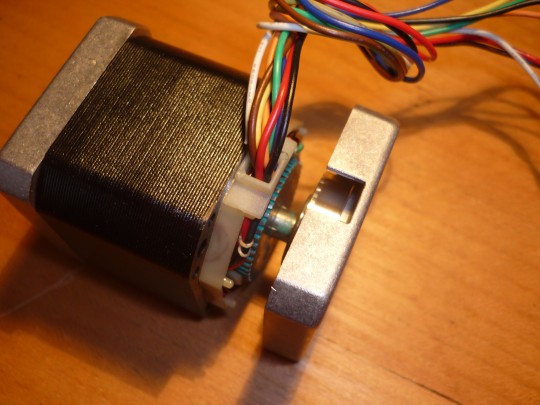
Parametry motoru Microcon SX17–1705
- Úhel pootočení: 1,8°
- Rozměr: 42×42×48 mm
- Průměr hřídele: 5 mm
- Statický moment: 0,5 Nm (bipolární napájení)
- Jmenovitý proud: 1,7 / 3,4 A (sériové/paralelní zapojení)
- Indukčnost: 3,2 / 0,8 mH (sériové/paralelní zapojení)
- Odpor: 2,4 / 0,6 Ω (sériové/paralelní zapojení)
- Zbytkový moment: 0,026 Nm
- Hmotnost: 0,35 kg