

Toto je jen jedno zapojení jednoho druhu motoru.
Další typy, zapojení různých druhů motorů a velikost jištění naleznete v článku Přehled a zapojení motorů.
Motory s kotvou nakrátko odebírají během rozběhu velké proudy, což způsobuje kolísání napětí v síti a možné vypínání předřadného jistícího přístroje. Kvůli omezení výpadků a rušení se větší třífázové asynchronní motory s kotvou nakrátko nejčastěji zapojují do konfigurace hvězda – trojúhelník (Y-D / Y-Δ), která velký rozběhový proud sníží. Další možností omezení proudového nárazu při zapínání je použití soft-starteru, frekvenčního měniče, nebo vřazením činného odporu do napájení motoru.
Před použitím rozběhu hvězda-trojúhelník je třeba zvážit ekonomickou stránku… Při použití tohoto způsobu rozběhu je nutné použít tři stykače, specializované časové relé, ovládací obvod, vícežilový přívod k motoru a v případě ochrany motoru tepelné relé. Cena těchto komponent se může vyšplhat na docela vysokou částku, nehledě na dobu montáže. Oproti tomu je softstarter „krabička“ která má tři přívody, tři vývody a svorky na připojení tlačítka start a stop. Softstarter často zastane i ochrannou funkci a lze ho snadno konfigurovat.


[reklama]
- Důvod rozběhu Y-Δ
- Které motory lze využít pro rozběh Y-Δ
- Rozběh v konfiguraci Y
- Provoz v konfiguraci Δ
- Zapojení přepínačů Y-Δ
- Jištění motoru při rozběhu Y-Δ

Jaké motory lze využít pro rozběh Y-Δ?
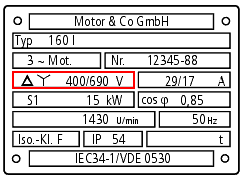
V naší síti s fázovým napětím 230 V, sdruženým napětím 400 V lze použít pro přepínání Y-Δ pouze motory, které mají při zapojení do trojúhelníku jmenovité napětí 400 V (starší mají 380 V) a při zapojení do hvězdy napětí 690 V (starší mají 660 V). Tedy motory s označením Δ/Y 400/690 V.
Motory s menším výkonem (cca do 3 kW) mají obvykle jmenovité napětí při zapojení do trojúhelníku 230 V (starší 220 V) a při zapojení do hvězdy 400 V (starší 380 V). Tyto motory lze na na trojfázovou síť (400 V) připojit pouze v konfiguraci do hvězdy. Na jednofázovou síť (230 V) přes jednofázový frekvenční měnič, nebo pomocí kondenzátoru (cca 70 μF na 1 kW), který nahradí třetí fázi (motor pak má omezený výkon, viz článek Přehled a zapojení motorů).
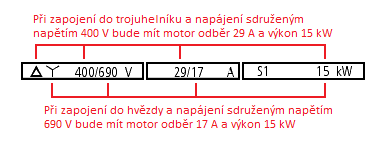
Na obrázku níž je červeně orámováno značení vhodného motoru – při zapojení do trojúhelníku se motor napájí 400 V, při zapojení do hvězdy se motor napájí 690 V. Dále je nutné brát v potaz odebíraný proud a podle toho dimenzovat přívody, stykače apod.



Rozběh v konfiguraci Y
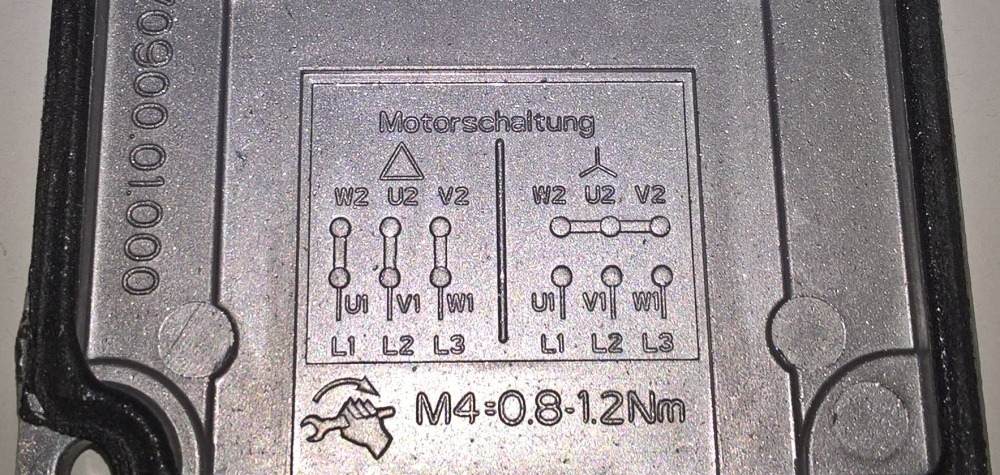
Motor se při rozběhu zapojí do hvězdy a připojí se na něj napětí 400 V. Protože při zapojení do hvězdy je jmenovité napájecí napětí motoru 690 V bude se rozbíhat při podpětí. Napětí na vinutích je menší √3 -krát (400 * √3 ≈ 690 V), odebíraný proud i výkon tedy klesne na 1/3. Motor je nutné rozbíhat bez zátěže, nebo pouze s malou zátěží tak, aby se motor nepřetížil. Zapojení svorek je většinou vylisováno na víčku svorkovnice. Nemusí být stejné jako zde na obrázku.


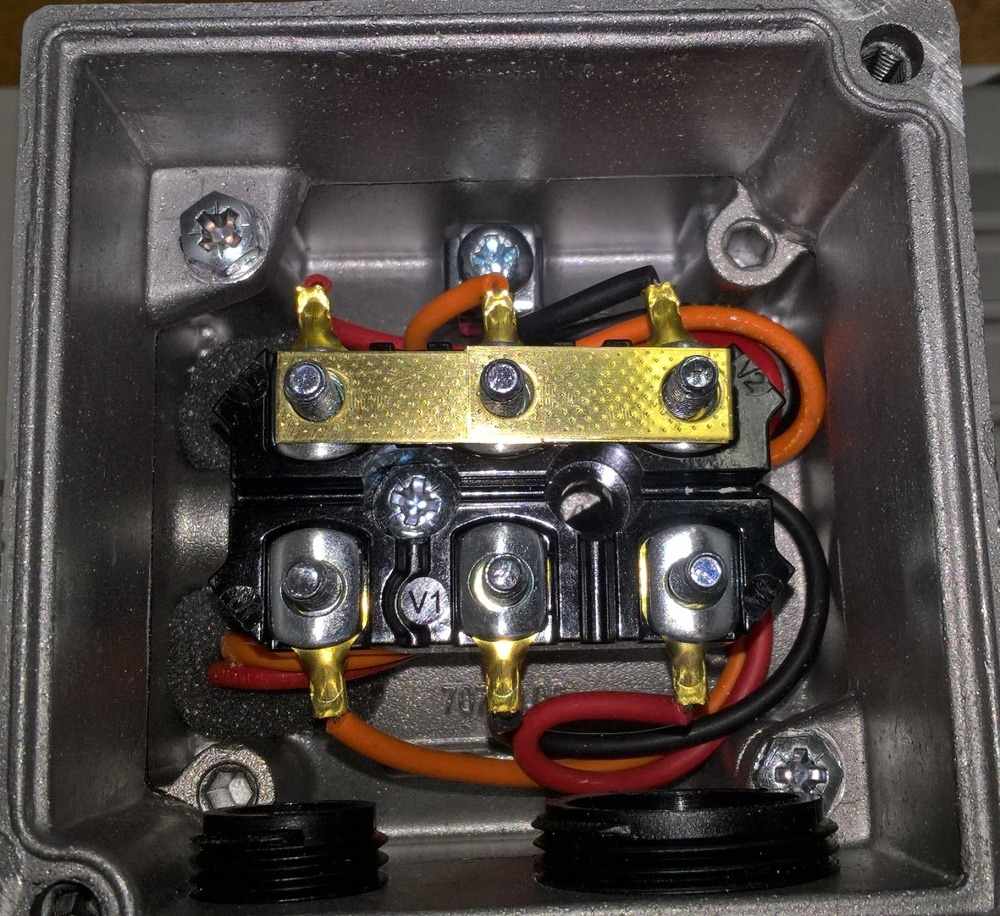
Při připojení napětí na mez L1 a L2 (ULN) teče proud (ILN) přes dvě sériově zapojené cívky. Výsledná impedance je větší – odebíraný proud (a tedy i výkon) je menší.

Provoz v konfiguraci D
Po rozběhu na jmenovité otáčky je nutné motor přepnout do trojúhelníku. Na vinutí se připojí 400 V, na které je dimenzované. Motor poběží na plný výkon. Otáčky bude mít stejné, jako při běhu do hvězdy.
Přepnutí do konfigurace D může být zajištěno pouze časově (je zjištěno za jakou dobu se motor bezpečně rozběhne), hlídáním proudu motoru (při roztočení na jmenovité otáčky klesne odebíraný proud motoru, viz video výše), nebo přímo hlídáním dosažení otáček (to lze provést pomocí např. indukčního snímače, tachogenerátoru, nebo pomocí relé ALNICO).

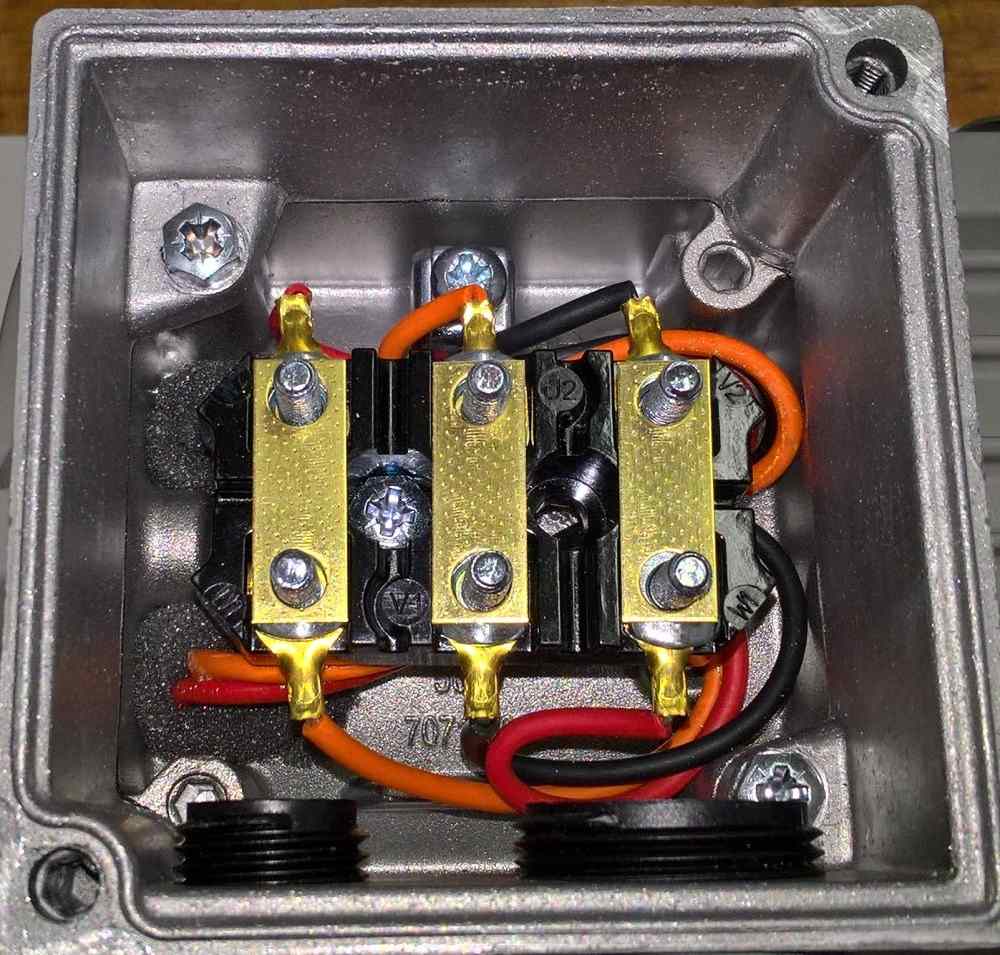
Zapojení svorek je většinou vylisováno na víčku svorkovnice. Nemusí být stejné, jako zde na obrázku. Při připojení napětí na mez L1 a L2 (ULN) teče proud (ILN) přes sério-paralelní zapojení všech třech cívek. Výsledná impedance je menší – odebíraný proud a tedy i výkon je větší.

Pokud se motor nepřepne do trojúhelníka hrozí přetížení motoru a jeho následné zničení!
Zapojení přepínačů Y-Δ
Pro spouštění motoru je nutné použít nějaký spouštěč – buď manuální (používaný např. u cirkule), kde se přepínačem přepne motor nejprve do hvězdy a po chvíli do trojúhelníku, nebo automatické (ve větších strojích), kde se o přepnutí postará automatika. V obou případech přepínače nahrazují výše znázorněné propojky ve svorkovnicích, takže ty je nejprve nutné odpojit!




Manuální přepínač (spouštěč)
Ve většině případů k manuálnímu spouštění vyhovuje vačkový spínač např. od české firmy OBZOR. Lze použít běžný typ 9551, což je prostý přepínač Y-Δ . Na svorky 1, 10 a 13 se připojí napájecí napětí, na svorky 3, 4, 5, 6, 15 a 16 se připojí jednotlivé konce vinutí na svorky označené písmeny (viz obrázek níž).
Obzor sám má e-shop, kde si můžete vybrat přepínač nejdříve podle ampéráže a poté podle typu (přepínače jsou označeny popiskem, k čemus louží). Případně je možné použít konfigurátor. Přepínač rozběhu hvězda trojúhelník s čelní deskou s kontakty na 25 A má typ VSN25 9551A8-V-PNC-S-210-NSC
- VSN25 – Přepínač řady VSN23
- 9551 – Schéma 9551 (přepínač Y-D)
- A8 – rozložení spínače 0-Y-D (po 45°)
- V – uchycení šrouby zepředu
- PNC – černá čelnídeska o velikosti 66*66 mm
- S – Standardní popis čelního štítku
- 210 – popis štítku
- NSC – Ovládací prvek -šipka střední černá
Směr otáčení se změní prohozením dvou libovolných fází na přívodu k přepínači.
Přepínače v e-shopu: Elima, Emas

Pokud je potřeba reverzace lze použít přepínač 9153, což je reverzační přepínač Y-Δ . Zapojení je stejně jednoduché jako u předchozího přepínače (přívody na svorkách 1, 5 a 20, vývody na svorkách 2, 4, 9, 15, 16 a 19). O vše se stará vnitřní uspořádání přepínače.

Takto jednoduché zapojení má však nevýhodu, a tou je nutnost obsluhy, která pohlídá zda se již motor roztočil na jmenovité otáčky a poté přepne motor do trojúhelníku. Příliš brzkým přepnutím může vzniknout proudový náraz, který vybaví předřadný jistič, nebo jiné jistící zařízení. Proto se u strojů, které má obsluhovat méně znalá obsluha používá automatické přepínání, které navíc např. blokuje chod stroje, než dojde k přepnutí do Δ.
Automatický přepínač (spouštěč)
Princip automatického přepínání je stejný jako u manuálního přepínání. Pouze se o přepnutí stará automatika, nebo časového relé, na kterém je nastaven čas, za který se motor bezpečně rozběhne na jmenovité otáčky. Po uplynutí tohoto času se motor přepne do trojúhelníka.
Kompletní automatický spouštěč vyrábí např. OEZ, jako moduly, které se jednoduše připojí k motoru a ovládacímu obvodu. Případně lze zapojení sestavit z jednotlivých komponent. Jako časové relé lze buď použít výstup z průmyslového automatu (viz článek Rozběh hvězda-trojúhelník s modulem Siemens Logo!) , který se často ve větších strojích již nachází, nebo specializované relé (např. CRM-2T). Tyto relé mají většinou nastavitelný jeden až dva časy – jeden na nastavení doby běhu do hvězdy (doba, než se motor roztočí) a druhý na prodlevu mezi vypnutím Y a zapnutím D (čas, kdy se vypnou stykače, aby nedošlo ke zkratu). Často bývá zapojení doplněno elektrickým i mechanickým blokováním stykačů.

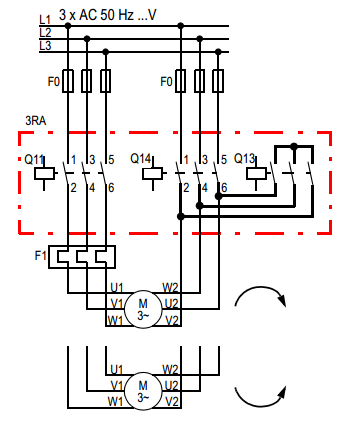
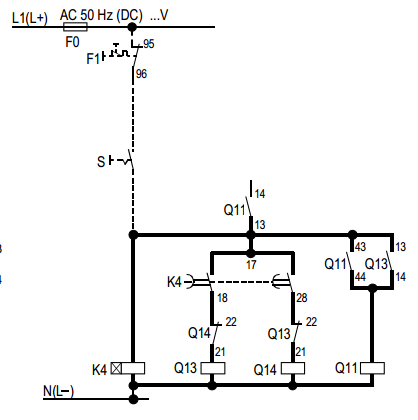
Princip je jednoduchý: Sepnutím spínače S se sepne časové relé K4, které sepne stykač Q13 (propojka na chod do hvězdy). Stykač Q13 zároveň přes pomocný kontakt sepne stykač Q11 (napájení), který se přes pomocný kontakt udrží zapnutý. Po nastaveném čase se stykač Q13 vypne a sepne se stykač Q14 (propojka na chod do trojúhelníka). Stykače Q13 a Q14 jsou navzájem blokované rozpínacím kontaktem, aby nedošlo k jejich současnému sepnutí (nastal by zkrat). Časové relé ve schématech níže není běžné časové relé, ale speciál určený ke spínání motoru Y-D! Oba spínací kontakty nespínají zároveň! Jako vhodné relé může sloužit např. výše zmíněné CRM-2T od ElkoEP.

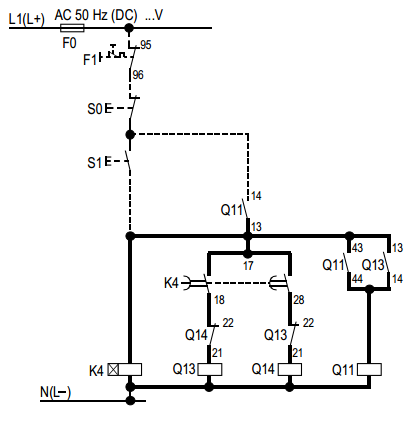
Toto zapojení je podobné zapojení výše, akorát se místo spínače používají tlačítka. Stisknutím S1 se do obvodu přivede napájení. Po sepnutí Q11 se tlačítko S1 přemostí pomocným kontaktem, není tedy nutné ho držet sepnuté. Vypnutí se provede stisknutím rozpínacího kontaktu S0 – tedy odpojením obvodu od napájení.

Zapojení ostatních modulů je většinou podobné. Nejdůležitější je blokace stykačů Q13 a Q14 proti současnému sepnutí, dále pak zajištění, aby motor trvale neběžel do hvězdy. Pokud se použije výše uvedené časové relé CRM-2T, je schéma zapojení v návodu.
Při použití programovatelného automatu je možné přepínat režim motoru v závislosti např. na aktuálních otáčkách motoru apod. Více o použití morulu Siemens Logo naleznete v článku Rozběh hvězda-trojúhelník s modulem Siemens Logo!

Jištění motoru při rozběhu Y-Δ
Jištění motoru při rozběhu Y-D není úplně jednoduché. Motor je nutné chránit proti zkratu i proti přetížení. Ochranu proti zkratu zajistí vhodné pojistky vřazené do přívodu napájení. Je lepší použít pojistky kvůli jejich větší zkratové odolnosti. Při přepínání hvězda-trojúhelník hrozí vyšší riziko vzniku zkratu kvůli použitým stykačům. I když by k tomu nemělo docházek díky elektrickému i mechanickému blokování mezi stykači, může se stykač svařit a dojít k tvrdému zkratu na přívodu.
Ochrana proti přetížení by měla být dvojí. Motor je nutné chránit proti přetížení nejen během provozu, ale i během rozběhu. Ale během rozběhu motor odebírá pouze třetinový proud, proti nominálnímu! Nelze tedy jednoduše připojit např. motorový spouštěč, nebo nadproudové (tepelné) relé do přívodu napájení. Kvůli zamezení výpadků by se hodnota jmenovitého vybavovacího proudu musela nastavit na jmenovitý proud motoru (motor by nebyl jištěn při běhu do Y). Nebo by se muselo nastavení proudového relé po přepnutí do Δ změnit (to je v praxi nereálné).

Nadproudové relé lze však zapojit několika způsoby podle druhu ochrany motoru:
- Kompletní ochrana motoru při běhu do hvězdy i do trojúhelníka
- Ochrana motoru při běhu do trojúhelníka a částečná ochrana při běhu do hvězdy
- Ochrana motoru pouze při běhu do trojúhelníka
Kompletní ochrana motoru při běhu do hvězdy i trojúhelníka
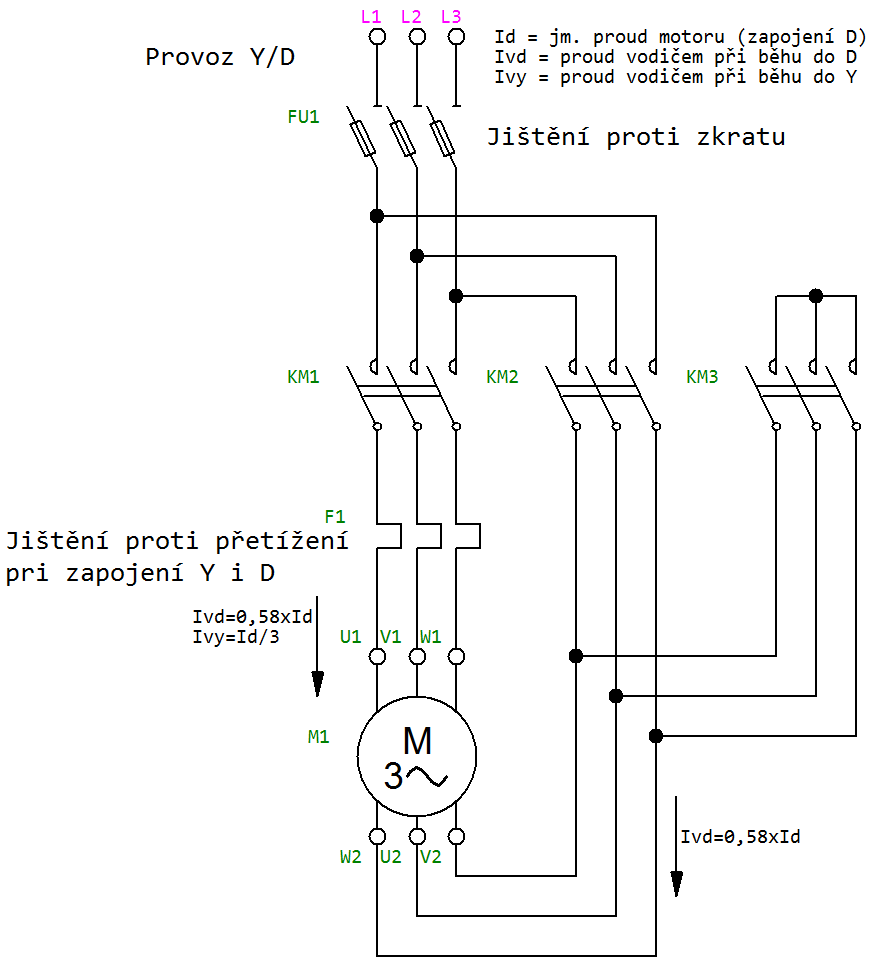
Při jmenovitém zatížení, při rozběhu motoru teče jednotlivými vinutími motoru proud Ivd = Id/√3 = Idx0,58. Zapojením nadproudového relé (F1) do série s vinutím motoru a nastavením vypínacího proudu relé na 0,58×Id je zajištěna kompletní ochrana motoru při běhu do Y i do Δ. Při běhu do Y, kdy je odebíraný proud menší je motor napájen pouze třemi vodiči. Při provozu do Δ, kdy je odebíraný proud větší je motor napájen vodiči šesti. Na stejný proud (0,58×Id) může být dimenzován hlavní stykač (KM1) a stykač pro běh do Δ (KM2). Stykač pro běh do Y (KM3) může být dimenzován na proud Id/3.

Ochrana motoru při běhu do trojúhelníka a částečná ochrana při běhu do hvězdy
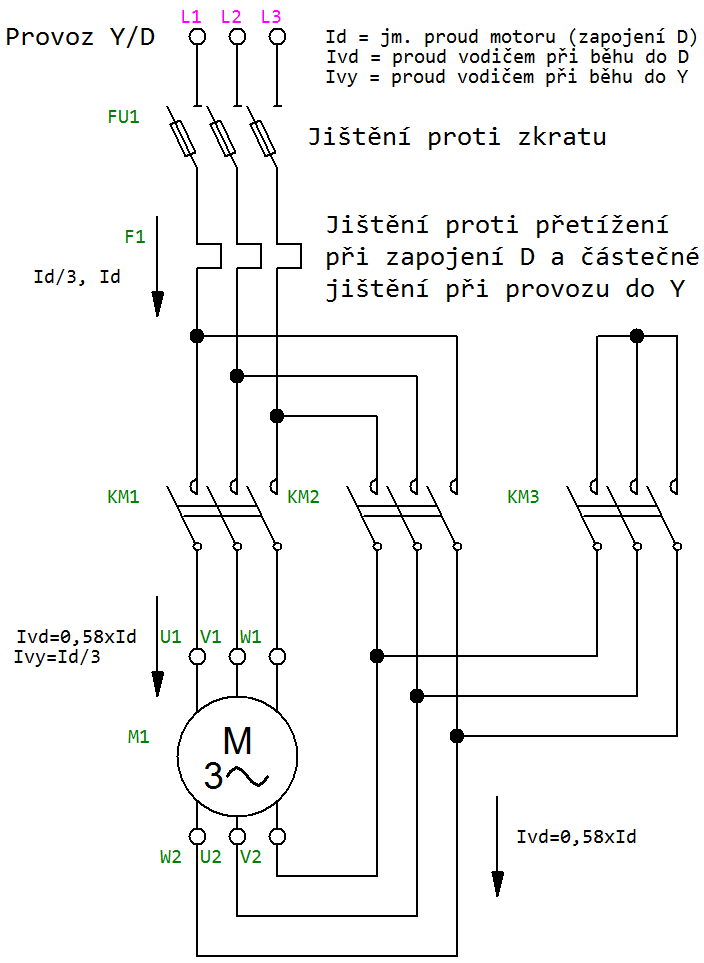
Pokud je nadproudové relé (F1) zapojeno (a nastaveno na jmenovitý proud motoru) v napájecím vedení je zajištěna plná ochrana motoru při běhu do trojúhelníka, protože je v tomto zapojení odebírán jmenovitý proud. Při rozběhu, tedy když je motor zapojen do hvězdy je odebíraný proud 1/3 proudu jmenovitého (Id/3). Toto snížení proudu způsobí prodloužení vybavovacího času tepelného relé 4× – 6×. Avšak, pokud se motor nerozběhne stačí tento čas na vybavení nadproudového relé – zabrzděný motor odebírá větší proud než Id/3 (Id = proud motoru při běhu do Δ). Proudové dimenzování stykačů je stejné jako v předchozím případě. Toto zapojení lze použít, pokud při startu motoru nadproudové relé často vypíná. Při tomto zapojení je vhodné hlídat teplotu vinutí motoru vestavěným termistorem, nebo bimetalovým kontaktem v motoru.

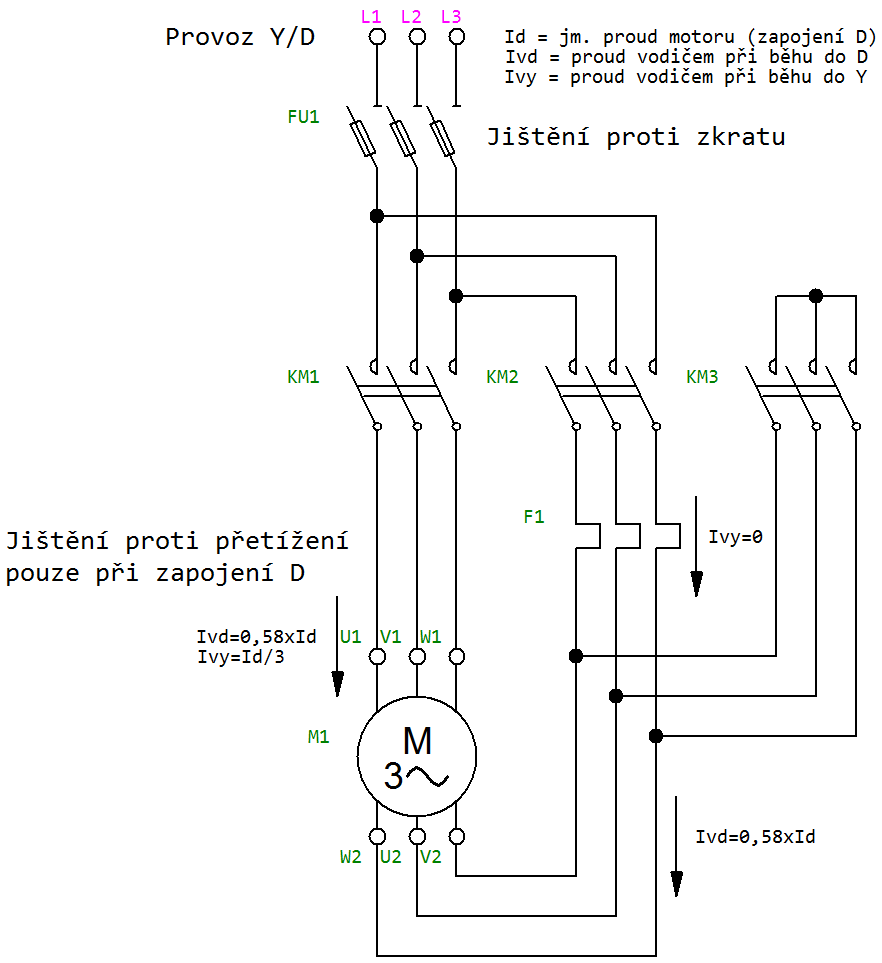
Ochrana motoru pouze při běhu do trojúhelníka
V tomto případě se tepelné relé (F1) zapojí do obvodu druhého stykače tak, aby jím neprotékal žádný proud při běhu do hvězdy. Vypínací proud relé se nastaví na 0,58×Id, protože je při běhu do trojúhelníka motor napájen šesti vodiči, tedy „ze dvou stran“. Proudové dimenzování stykačů je stejné jako v předešlých případech. Tento typ zapojení se používá, když má motor těžký a dlouhý rozběh. Při tomto zapojení je vhodné hlídat teplotu vinutí motoru vestavěným termistorem, nebo bimetalovým kontaktem v motoru.

Ještě je zde jako bonus video výroby asynchronního motoru.