

Tento článek by měl sloužit jako přehled zapojení různých motorů, neboť i „obyčejný“ trojfázový asynchronní motor lze zapojit několika způsoby. Postupně jsou v článku probrány všechny nejběžnější druhy elektrických motorů. Jak tedy který motor zapojit?? Všechny motory, stejně tak jako veškerou elektroniku vždy zapojujte podle návodu výrobce!


- Druhy a parametry motorů
- Třífázový asynchronní motor s kotvou nakrátko
- Orientační hodnoty odebíraného proudu motorem, přívodní kabel a jištění
- Běžný 3f motor s označením na štítku ΔY 230/400 V
- Běžný 3f motor s označením na štítku ΔY 400/690 V
- Motor s více oddělenými vinutími
- Motor s přepínáním Δ – YY (trojúhelník – dvojitá hvězda)
- Motor s přepínáním Y – YY (hvězda – dvojitá hvězda)
- Třífázový asynchronní motor s kroužkovou kotvou (Kroužkový motor)
- Jednofázový asynchronní motor
- Synchronní motor
- Univerzální motor
- Krokový motor (→ Krokový motor – princip)
- Vliv snížení tlaku vzduchu, nebo hustoty vzduchu
Odkazy označené šipkou (→) směřují na samostatné stránky věnující se problematice blíže.
Druhy a parametry motorů
První věc, kterou je nutné si zjistit je jaký motorů vůbec chceme zapojovat? Ne všechny jsou třífázové, asynchronní a i jeden typ motoru jde často zapojit několika způsoby. Jediný 100% spolehlivý způsob jak správně zapojit motor je řídit se instrukcemi výrobce. Ten udává napájecí napětí, proud, zatěžovatel, prostředí atd. Parametry motoru jsou uvedeny vždy na štítku motoru, nebo v datasheetu. V žádném případě není správný způsob např. výměny motoru zapojit ho „tak jak byl ten předtím“. Může se stát, že nový motor je na jiné napětí a může lehce dojít k jeho zničení.

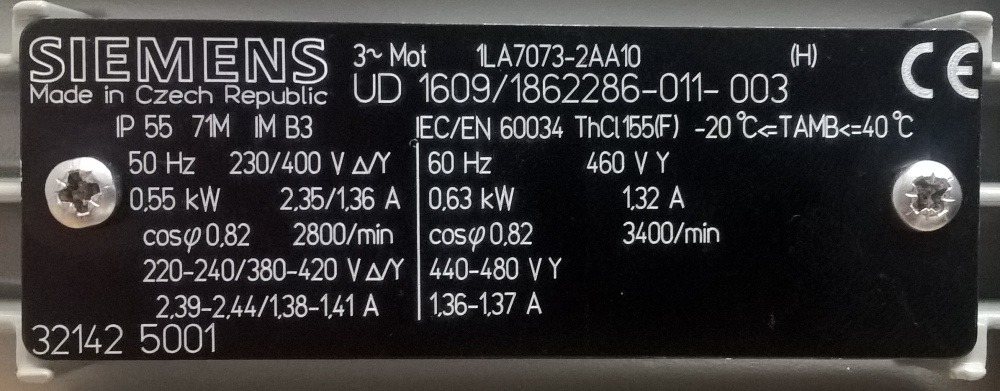
- Výrobce Siemens, vyrobeno v České republice
- Typ motoru 1LA7073–2AA10
- Motor má označení CE
- 3≈Mot – Třífázový motor
- IP 55 – Krytí IP 55
- 71M – Osová výška (od spodku patek ke středu hřídele 71 mm)
- IM B3 – Tvar elektromotoru (patkový)
- IMB3 = patkový motor
- IMB5 = přírubový
- IMB35 = patkopřírubový
- IMB14 = s menší, nebo větší přírubou (menší než IMB5)
- IMB34 = patkopřírubový s menší přírubou
- –20°C<=TAMB<=40°C – Provozní (okolní) teplotu motoru –20 až 40° C
- 50 Hz 230/400 V Δ/Y – Při zapojení do Δ má motor napájecí napětí 230 V, při zapojení do Y má napájecí napětí 400 V
- 0,55 kW – výkon motoru 0,55 kW
- 2,35/1,36 A – Odebíraný proud při nominálním zatížení a provozu do Δ a do Y
- 220–240/380–420 V Δ/Y – Rozsah napájecích napětí při provozu do Δ a do Y
- 2,39–2,44/1,38–1,41 A – Rozsah odebíraného proudu při provozu do Δ a do Y
- S1 – Trvalý chod. Toto označení nemusí být uvedeno. Motor se je při plném zatížení a dodržení provozních podmínek schopen ochladit na provozní teplotu.
- S2 – Krátkodobý chod. Na štítku je uvedena doba zatížení. Poté musí být motor odpojen a ochlazen na okolní teplotu
- S3 – Přerušovaný chod. Na štítku je uvedena doba zatížení v % (většinou z 10 minutového cyklu). Po dosažení doby musí být motor na zbývající dobu odpojen. Motor se během odpočinku neochladí na teplotu okolí. Rozběh motoru neovlivňuje oteplení.
- S4 – Přerušovaný chod s rozběhem. Stejné jako S3, ale je nutné vzít v úvahu rozběh motoru.
- S5 – Přerušovaný chod s elektrickým brzděním.
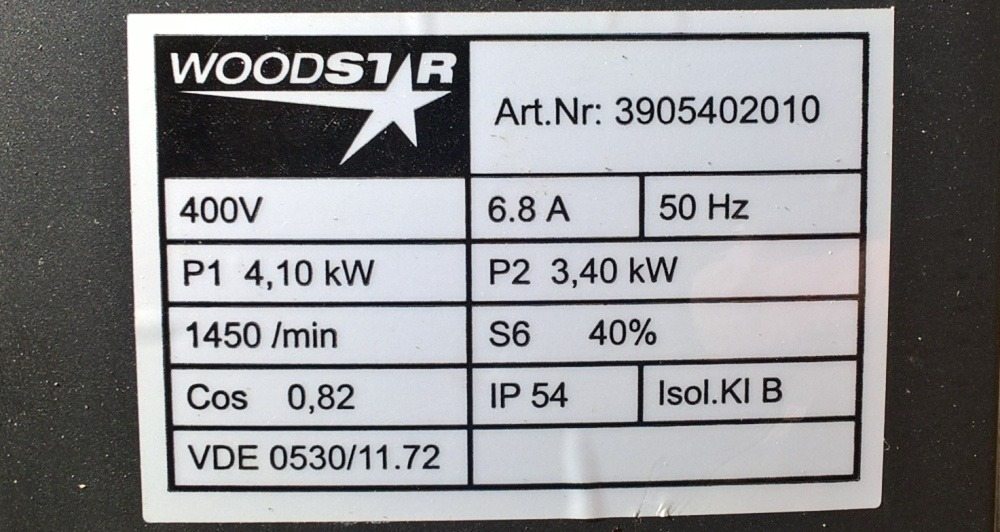
- S6 – Přerušované zatížení. Chod motoru, kdy je motor po určitý čas (% cyklu) zatížen a zbývající čas odlehčen = čas kdy motor běží naprázdno.
- S7 – Pravidelné přerušované zatížení s elektrickým brzděním.
- S8 – Pravidelné přerušované zatížení se změnami otáček spojenými se změnami zatížení.
- S9 – Nepravidelné zatížení a změny otáček.
- S10 – Zatížení s nespojitými konstantními zatíženími.

Třífázový asynchronní motor s kotvou nakrátko
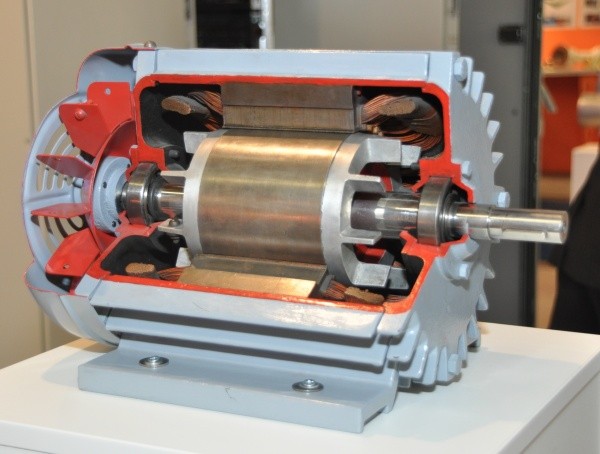
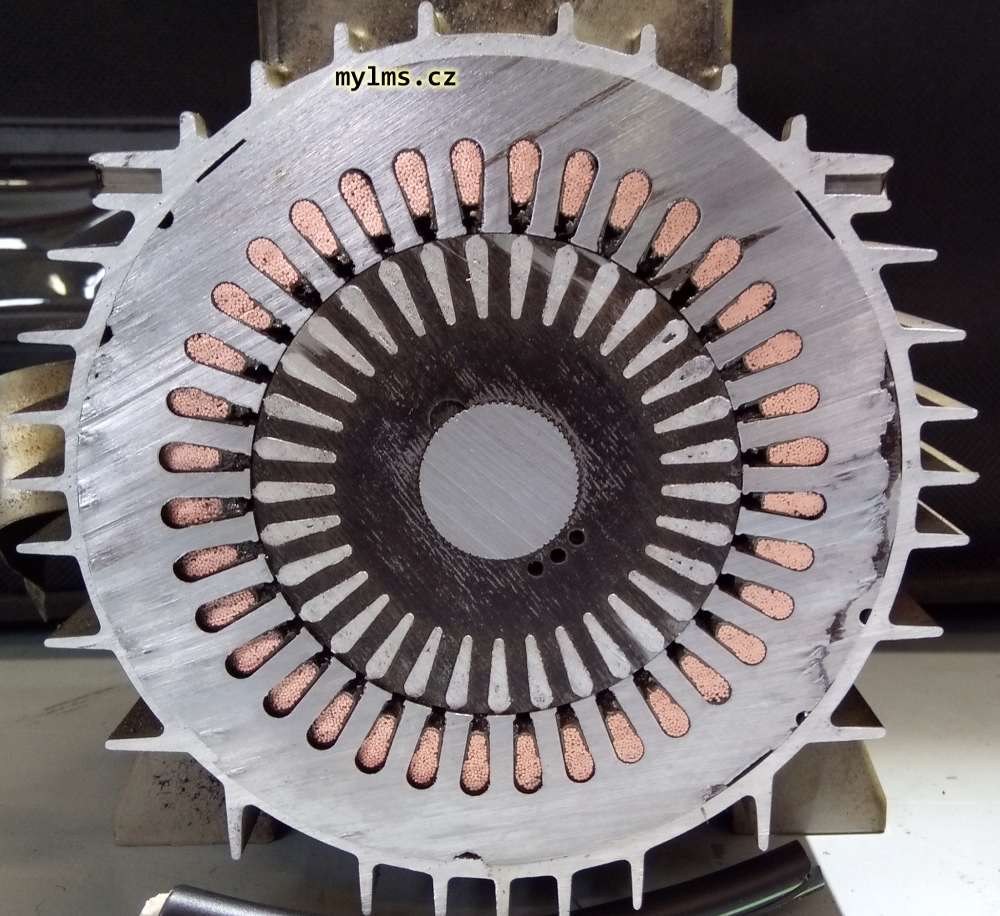
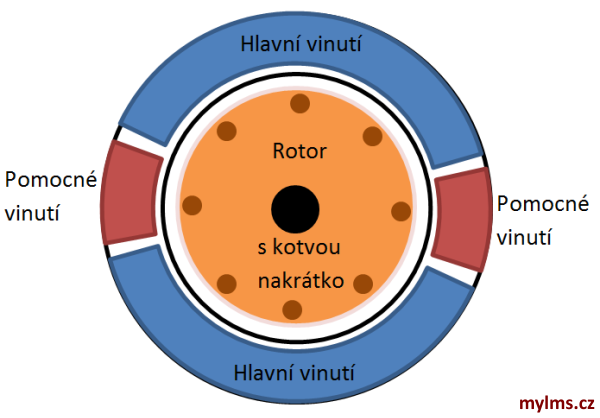
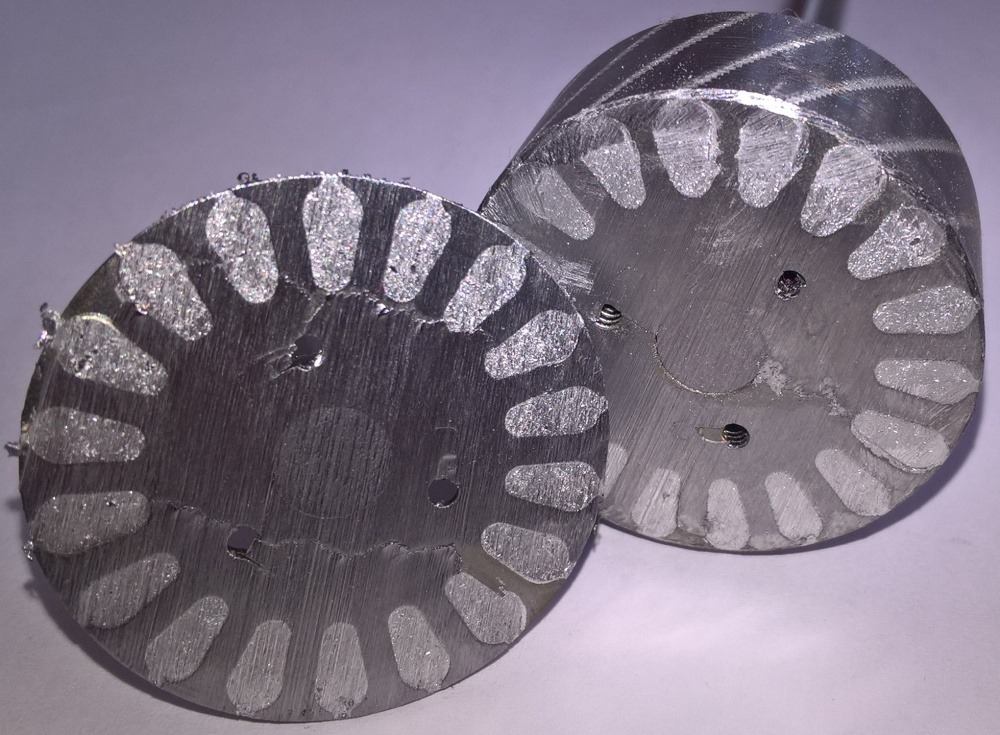
Jedná se o nejběžnější typ motoru. Stator motoru má několik dvojic cívek (p) připojených k síťovému napětí s určitou frekvencí (f). Ve statoru vznikne synchronní točivé magnetické pole (má otáčky podle síťové frekvence, dle vzorce (ns = 60 * f / p)). Toto magnetické pole vyvolá v kleci rotoru (slisované plechy s hliníkovým, nebo měděným vinutím) napětí a vzniklý proud a magnetický tok vyvolá sílu otáčející rotorem. Kdyby se rotor roztočil na synchronní otáčky, tak by se vůči magnetickému poli statoru neotáčel. V rotoru by se neindukovalo napětí a síla otáčející rotorem by klesla. Hřídel asynchronních motorů se tedy vždy točí asynchronními otáčkami oproti otáčkám magnetického pole statoru. Rozdíl těchto otáček se nazývá skluz, který bývá 3 až 5%. Rozdíl oproti synchronním otáčkám je závislý na konstrukci motoru, jeho účinnosti apod.

Změna směru otáčení motoru se provede přehozením dvou libovolných napájecích fází. Bývá zvykem přehodit první a třetí fázi, ale principiálně je to úplně jedno.
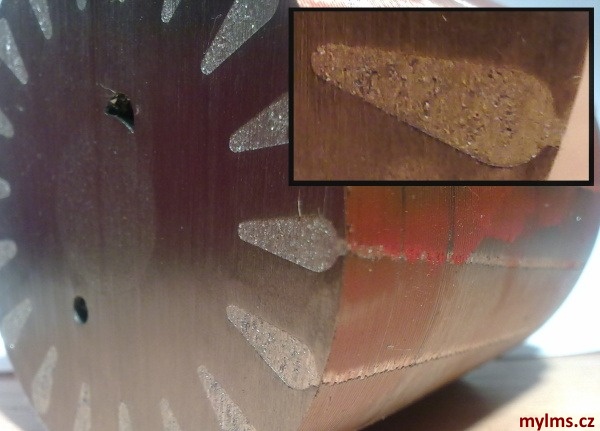
U motorů, které dostávají časté rázy při rozběhu (např. pohon stolu frézy, často spínaná čerpadla, apod.), nebo trpí přehříváním a nadměrnými vibracemi se může rotorové vinutí přerušit. Motor potom nemá sílu, rotor se hřeje, cuká, se zátěží se roztočí pouze na určité otáčky. Proud přitom odebírá správný a bez zátěže se točí běžnými otáčkami. Při zatížení má však obrovský skluz – buď se neroztočí vůbec, nebo pouze na určité malé otáčky, které jsou dány zatížením hřídele a rotor hřeje. Na rotoru to lze někdy poznat pohledem – některé plechy jsou pootočené – na rotoru není souvislá čára drážek.









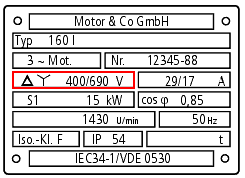
K třífázové síti (3×400 V; dříve 3×380 V) lze běžný 3f asynchronní motor připojit dvojím způsobem – v konfiguraci hvězda, nebo v konfiguraci trojúhelník. Existují další asynchronní motory s odlišným vinutím, které však nejsou tak časté. Důležité je se vždy řídit typovým štítkem a datovým listem motoru – při špatném zapojení může dojít ke zničení motoru.
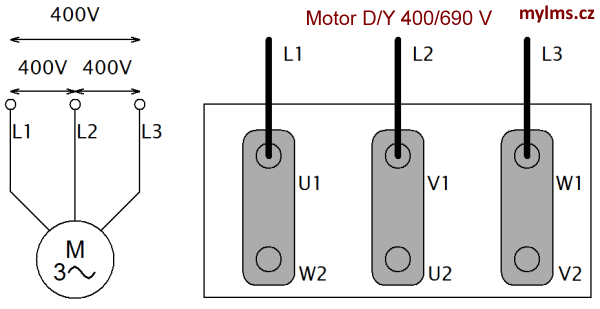
Na obrázku níž je znázorněn příklad štítku běžného třífázového asynchronního motoru s kotvou nakrátko. Červeně je orámováno značení vhodného motoru pro rozběh Y/D – při zapojení do trojúhelníku je jmenovité napájecí napětí 400 V, při zapojení do hvězdy je to 690 V. Dále je nutné brát v potaz odebíraný proud a podle toho dimenzovat přívody, stykače, jištění apod.


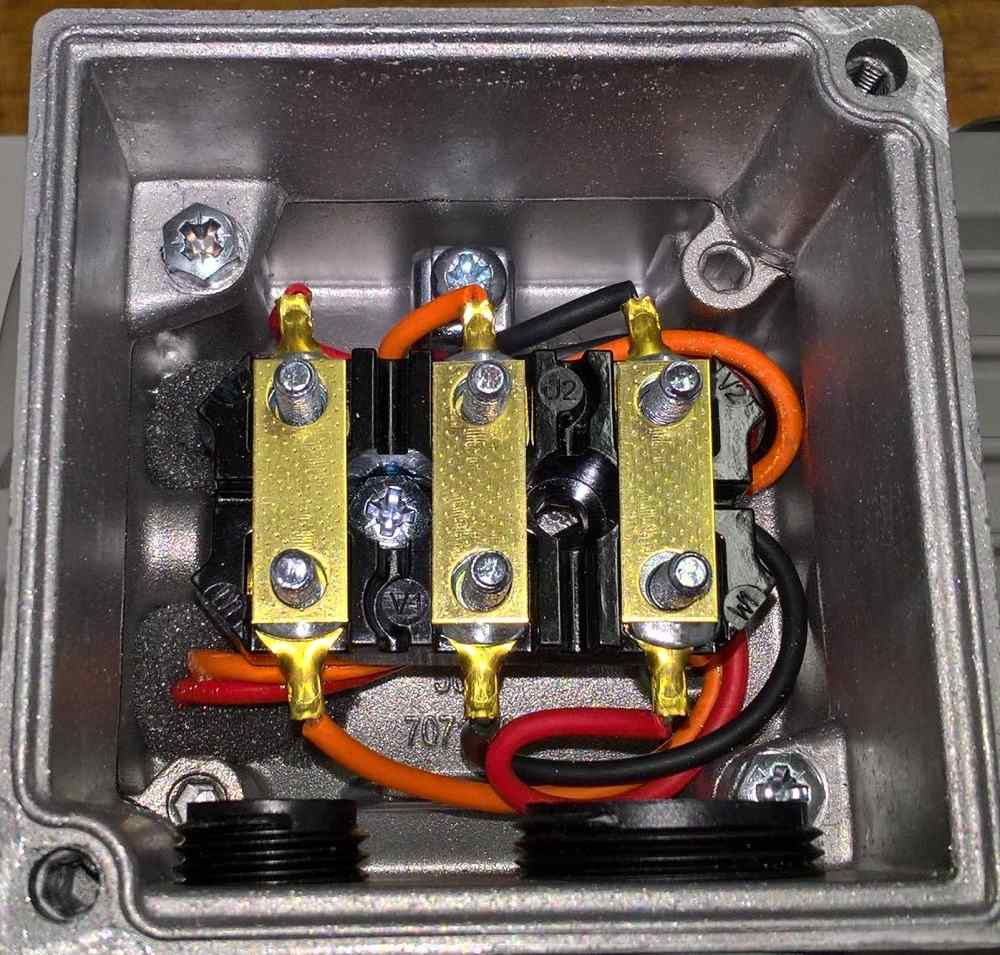
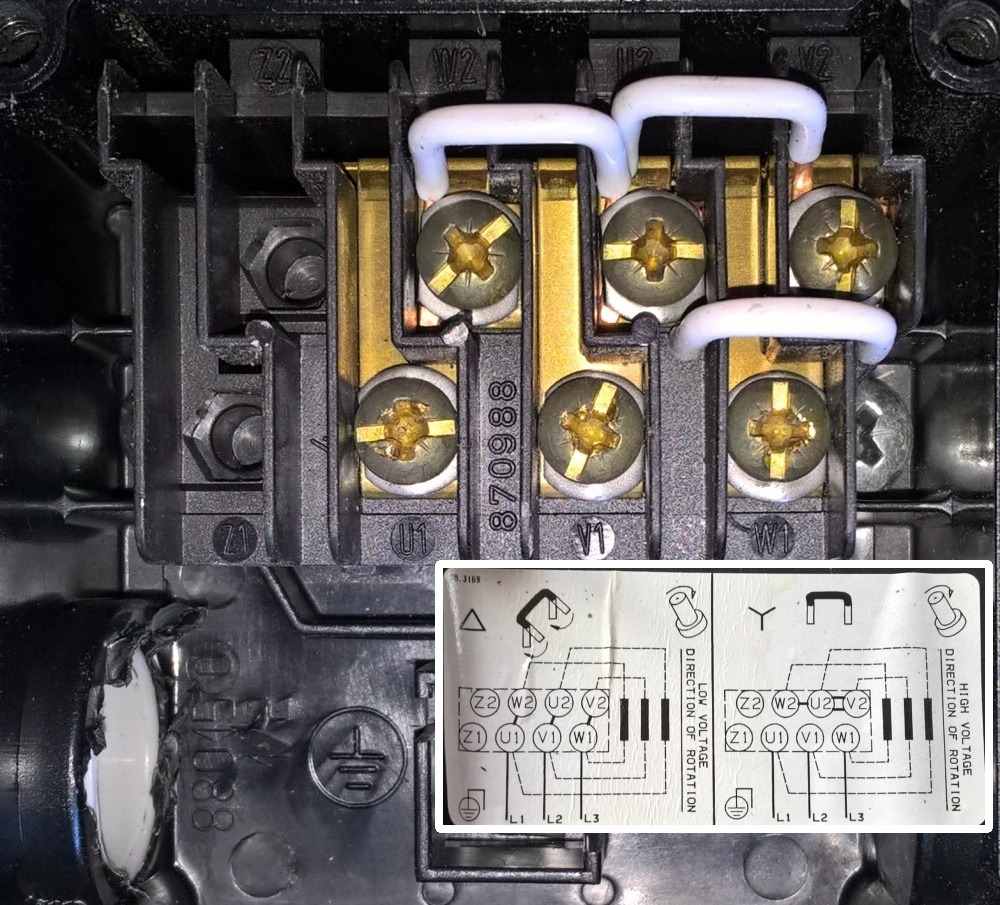
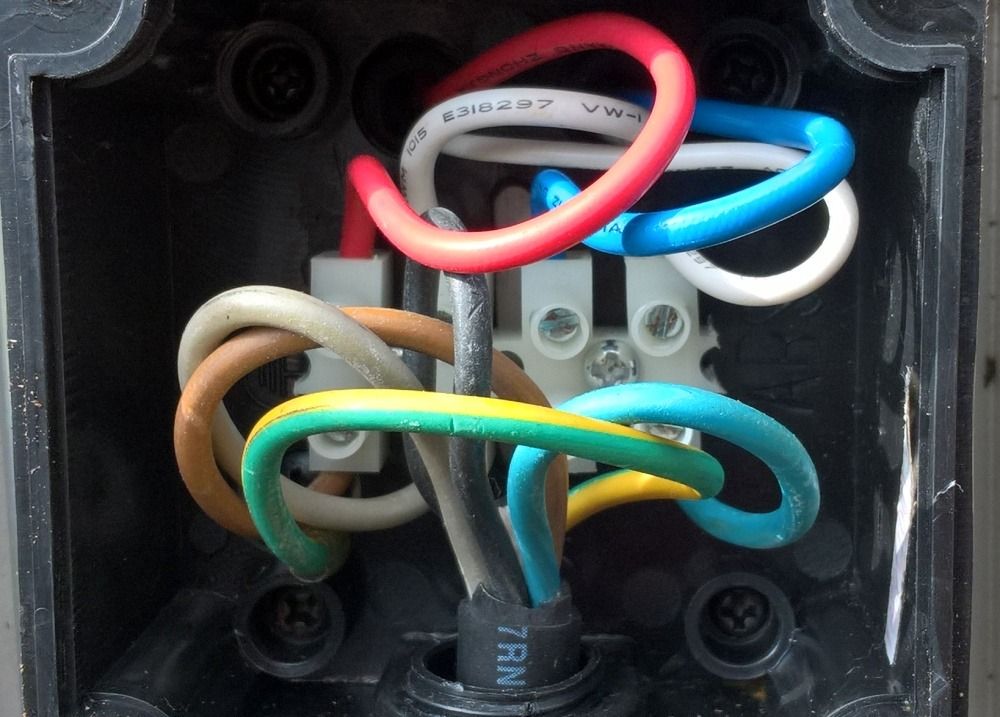
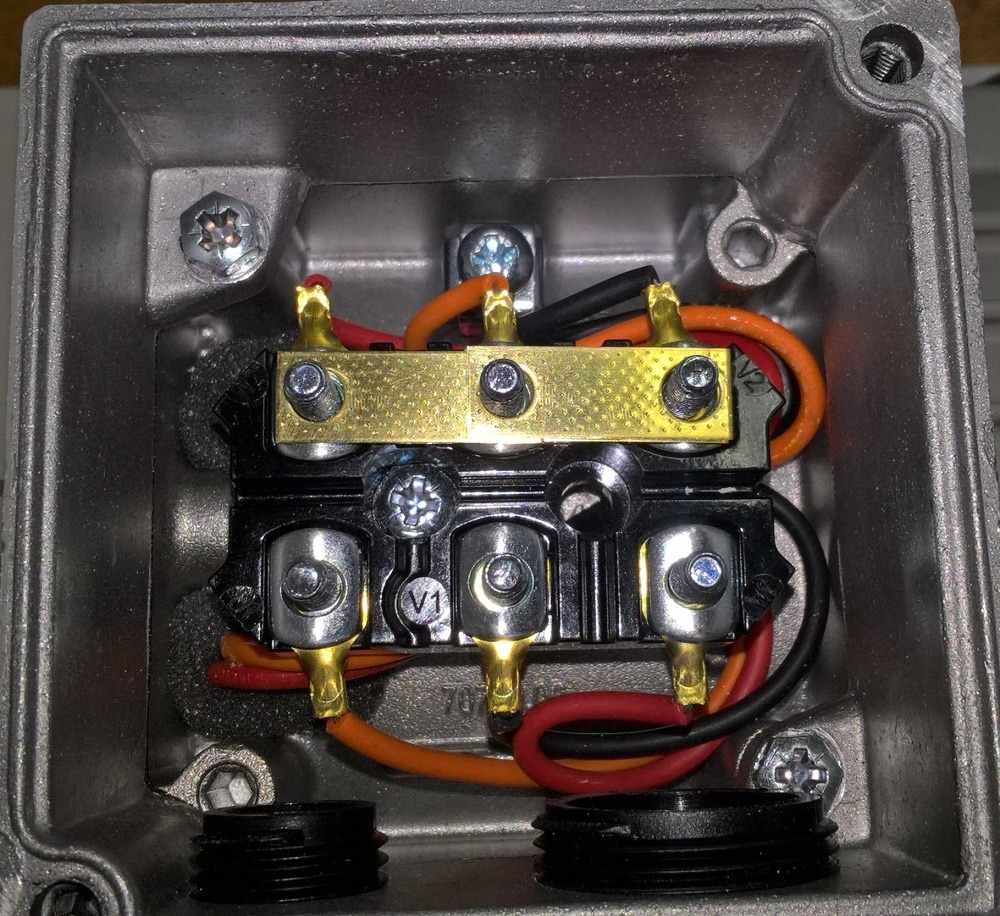
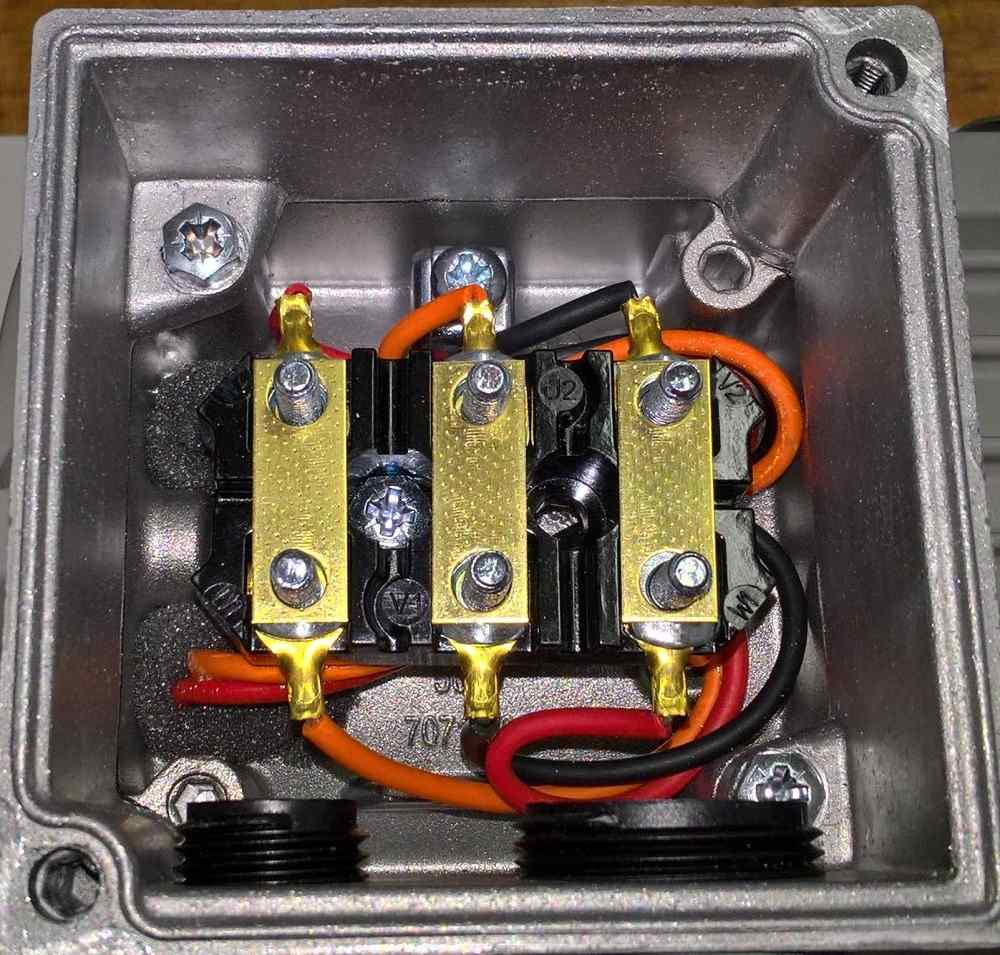
U většiny těchto motorů je použita standardní svorkovnice se svorníky, kde je vyvedeno všech šest konců vinutí. Lze se ovšem setkat i s ne zcela typickými svorkovnicemi, které nemají např. vyvedeny všechny konce vinutí (motor nelze přepojit většinou do trojúhelníku), mají vyvedeno ještě více vodičů (např. od brzdy), mají místo svorníku třeba obyčejnou svorkovnici (tzv. čokoládu), nebo mají úplně odlišný tvar. Vždy tedy záleží na konkrétním motoru a návodu k němu. Často je zapojení svorek vylisováno na víčku svorkovnice, případně je zde přilepeno schéma.



.
Orientační hodnoty odebíraného proudu motorem, přívodní kabel a jištění
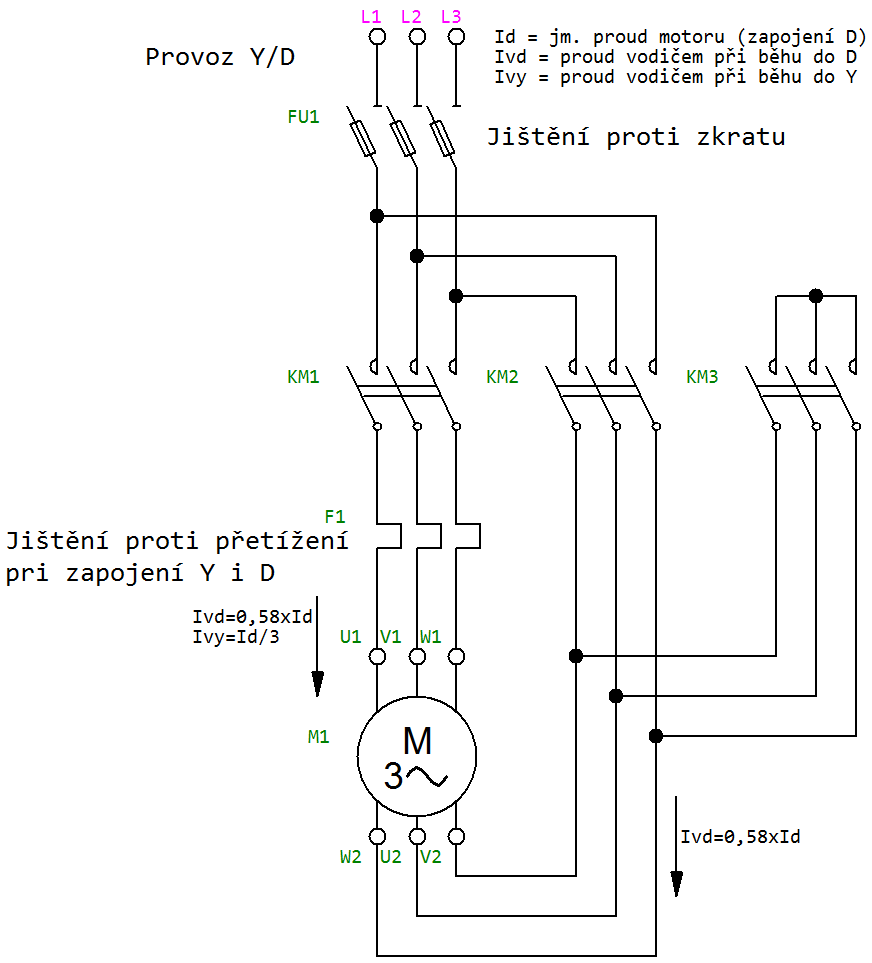
Zapojení motoru, tedy jeho předřadné jištění a přívodní kabel je závislý na použité aplikaci a vždy by měl vycházet z projektové dokumentace a měl by splňovat příslušné normy. Zde budou popsány pouze přibližné hodnoty! Motor by měl být jištěn jak proti zkratu, tak proti přetížení. Lze použít kombinovaný přistroj (tzv. motorový spouštěč, nebo jistič s „motorovou“ charakteristikou), případně pojistky s příslušnou charakteristikou, které jistí motor při zkratu a nadproudové relé, případně softstarter, nebo frekvenční měnič, který je nastaven na proud motoru. Dále se u motoru rozlišuje, zda je je spouštěn přímo (přímé zapnutí, softstarter, frekvenční měnič), nebo pomocí přepínání hvězda – trojúhelník. Při zapojení v konfiguraci YΔ je motor jištěn pojistkami stejně jako při přímém spouštění, u nadproudového relé však záleží kde v obvodu je zapojeno a jeho nastavení je jiné, než při přímém spouštění. Přívodní vodiče k motoru mohou mít menší průřez. Více informací je napsáno přímo v článku Přepínání motoru hvězda – trojúhelník.
Jištění vychází z jmenovitého proudu odebíraného motorem. K jištění proti zkratu se použije buď „pomalá“ pojistka typu aM, tedy pojistka s částečným rozsahem vypínací schopnost – určená k jištění motorových vývodů proti zkratu, nebo „motorový jistič“, nebo spouštěč s proudem, jako je jmenovitý proud motoru, nebo nejbližší vyšší. Pro jištění proti nadproudu (přetížení) se použije proudového relé, motorový spouštěč, nebo jistič, který je nutné nastavit na jmenovitý proud motoru (případně se měřením zjistí proud odebíraný motorem při běžném provozu a na ten se jistící přístroj nastaví). Při překročení tohoto proudu (tedy přetížení motoru) dojde k vypnutí kontaktu relé a tím vypnutí motoru. Průřez kabelu je závislý na aplikaci. O jeho použití rozhoduje jak proud motoru, tak délka a typ samotného kabelu, jeho uložení, teplota okolí, použití frekvenčního měniče atd. Zde popsané kabely jsou s uložením B2 (kabel v trubce na stěně, či ve zdi, v liště, nebo kabelovém kanále). Proudy jsou při napětí motoru 400 V.
Proud odebíraný motorem lze přibližně vypočítat pomocí kalkulačky. Maximální zatížení kabelu lze vypočítat pomocí webové aplikace Výpočet zatížení kabelu.
| Výkon (kW) | 0,06 | 0,09 | 0,18 | 0,25 | 0,55 | 0,75 | 1,5 | 2,2 | 4 | 5,5 | 7,5 | 11 | 15 | 18,5 | 30 | 37 | 45 |
| Orientační hodnoty při napájení 400 V (přímo, bez rozběhu Y/D) | |||||||||||||||||
| Proud (A) | 0,2 | 0,3 | 0,6 | 0,85 | 1,5 | 1,9 | 3,6 | 4,9 | 8,5 | 11,5 | 15,5 | 22 | 29 | 35 | 55 | 66 | 80 |
| Pojistka (A) | 0,5 | 1 | 2 | 2 | 4 | 4 | 6 | 6 | 16 | 16 | 20 | 25 | 32 | 50 | 63 | 80 | 100 |
| Kabel (mm2) | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 1,5 | 2,5 | 4 | 6 | 10 | 16 | 25 | 35 |
| Orientační hodnoty při napájení 400 V (při rozběhu Y/D) | |||||||||||||||||
| Pojistka (A) | – | – | – | 2 | 2 | 4 | 4 | 6 | 10 | 16 | 16 | 25 | 32 | 40 | 63 | 80 | 100 |
| Orientační hodnoty při napájení 230 V | |||||||||||||||||
| Proud (A) | 0,37 | 0,54 | 1,04 | 1,4 | 2,7 | 3,2 | 6,3 | 8,7 | 14,8 | 19,6 | 26,4 | 38 | 51 | 63 | 96 | 117 | 141 |
| Pojistka (A) | 2 | 2 | 4 | 4 | 10 | 10 | 16 | 20 | 32 | 32 | 50 | 80 | 100 | 125 | 200 | 200 | 250 |
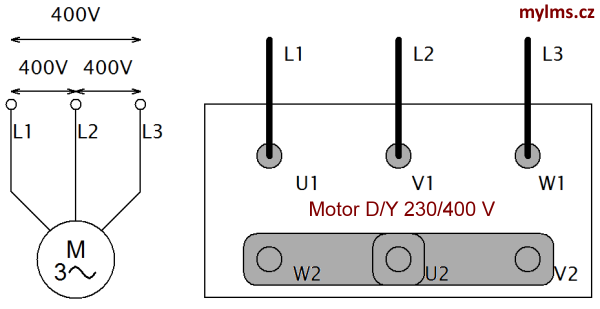
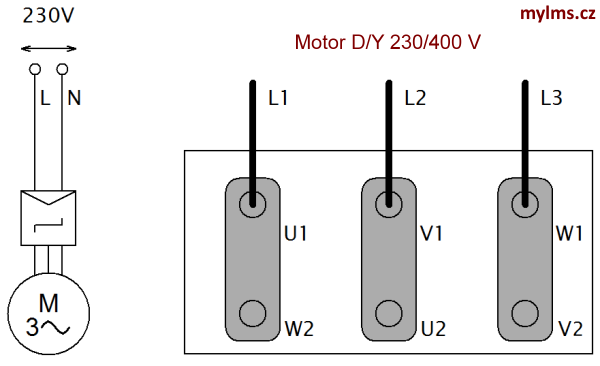
Běžný 3f motor s označením na štítku ΔY 230/400 V
Δ/Y 230/400 V – Tento motor lze přímo připojit k třífázové síti (3×400 V) pouze do konfigurace hvězda.
V opačném případě (připojení motoru v konfiguraci Δ na 400 V) dojde k poškození motoru vlivem přepětí! Motor bude fungovat na plný výkon (Y) při jmenovitém proudu a otáčkách uvedených na štítku. Reverzaci otáček lze provést přehozením dvou libovolných přívodních vodičů na svorkovnici motoru, nebo lze použít reverzační přepínač (viz níže). Často používané zapojení motoru.
+ Cena pouze za motor
+ Jednoduché zapojení
+ Plný výkon motoru
– Nelze regulovat rychlost motoru, ani jiné parametry

Δ/Y 230/400 V – Tento motor lze připojit k třífázové síti (3×400 V) do konfigurace hvězda přes třífázový frekvenční měnič.
V tomto zapojení lze měnit otáčky a další parametry motoru. Vždy je nutné řídit se manuálem ke konkrétnímu frekvenčnímu měniči! Napájecí svorky jsou většinou L1, L2, L3, nebo R, S, T a výstup do motoru bývá označen U, V, W , nebo T1, T2, T3. Přehození napájecích a výstupních svorek vede ke zničení měniče. Více informací o zapojení motoru přes frekvenční měnič naleznete v tomto článku.
+ Relativně jednoduché zapojení
+ Plný výkon motoru
+ Lze měnit parametry motoru (otáčky, brzdění, rampy, …)
– Vyšší cena měniče



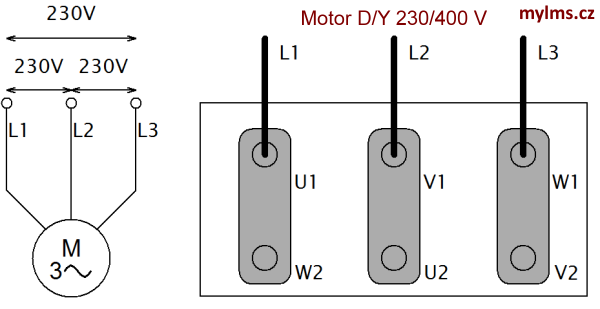
Δ/Y 230/400 V – Tento motor lze připojit k třífázové síti (3×230 V) do konfigurace trojúhelník.
Motor bude fungovat na plný výkon při jmenovitém proudu uvedeném na štítku. V případě zapojení do hvězdy bude motor fungovat na podpětí při sníženém výkonu (viz přepínání hvězda trojúhelník). Reverzaci otáček lze provést přehozením dvou libovolných přívodních vodičů na svorkovnici motoru, nebo lze použít reverzační přepínač (viz níže). Tato síť se obvykle v ČR nevyskytuje.
+ Cena pouze za motor
+ Jednoduché zapojení
+ Plný výkon motoru
– Tato síť se v ČR běžně nevyskytuje
– Nelze regulovat rychlost motoru, ani jiné parametry
Δ/Y 230/400 V – Tento motor lze připojit k jednofázové síti (1×230 V) do konfigurace trojúhelník přes jednofázový frekvenční měnič.
V tomto zapojení lze z motoru dostat plný výkon při 1f zapojení. Výhoda je nejen možnost použití 3f motoru na 1f síti, ale i možnost řídit otáčky a další parametry motoru. Nevýhoda je vyšší odběr proudu na jednofázovém přívodu (proto jsou jednofázové měniče vyráběny pouze do určitého výkonu) a cena frekvenčního měniče. Více informací o zapojení motoru přes frekvenční měnič naleznete v tomto článku.
+ Relativně jednoduché zapojení
+ Plný výkon motoru
+ Lze měnit parametry motoru (otáčky, brzdění, rampy, …)
+ Lze použít třífázový motor na jednofázové síti
– Vyšší cena měniče
– Vyšší zatížení jednofázového přívodu
– Nesymetrické zatěžování sítě (což u malých motorů zase tolik nevadí)

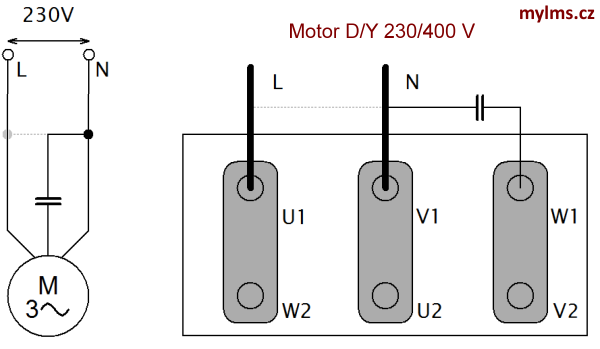
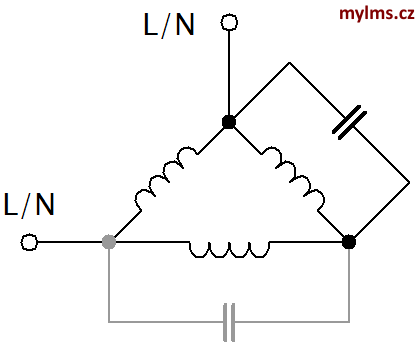
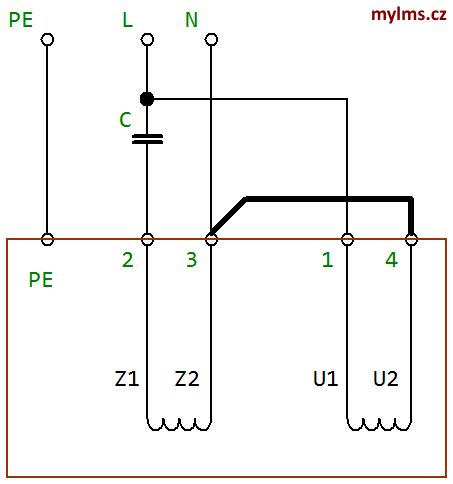
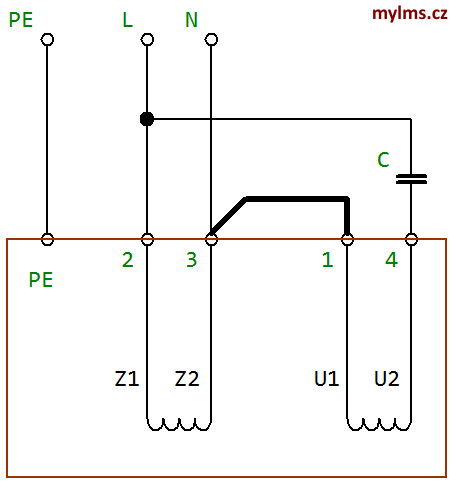
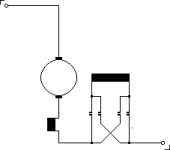
Δ/Y 230/400 V – Tento motor lze připojit k jednofázové síti (1×230 V) do konfigurace trojúhelník s pomocným (běhovým) kondenzátorem (Steinmetzovo zapojení).
Připojením kondenzátoru (vypočítat ze vztahu C = 64 * √P [μF; kW], tedy přibližně 60 – 68μF na 1 kW výkonu), který nahradí třetí fázi motoru. Nejlépe však změřit proud a kondenzátor upravit podle štítkové hodnoty motoru (záleží na konstrukci motoru) – proud by měl jít na na všechny fáze cca stejný. V motoru se vytvoří eliptické točivé pole. V tomto zapojení je kondenzátor připojen trvale, motor má snížený výkon (max. 70% jmenovitého výkonu) a menší rozběhový moment (cca 50%), nehodí se tedy pro náročné aplikace.
Reverzaci směru otáčení lze provést přepojením jednoho pólu kondenzátoru na L, nebo N (na obrázku šedě). Provozní napětí kondenzátoru musí být větší než špičkové napětí sítě, vlivem rezonancí je vyšší než napětí síťové. Doporučuji kondenzátor alespoň na 400 V – kondenzátor by měl být svitkový/fóliový na střídavé napětí. Běžně se dá tento druh kondenzátoru nalézt pod názvem rozběhový/běhový kondenzátor.
Při těžším rozběhu je možné připojit k motoru dva kondenzátory paralelně. Jeden jako běhový, který je připojen stále a jeden rozběhový, který se po roztočení motoru odpojí (tlačítkem, časovým spínačem, odstředivým spínačem, apod.). Přídavný kondenzátor zvýší proud vinutím, takže motor bude mít větší sílu při rozběhu. Je však potřeba ho po roztočení motoru odpojit, aby nedošlo k přetížení vinutí a jeho poškození.
Níže sice píši, že se nedají regulovat otáčky motoru, ale to není zcela pravda. Je možné použít buď jednofázový měnič frekvence (s jednofázovým výstupem), nebo jednoduchý triakový regulátor. Triakový regulátor mění napájecí napětí a tedy i skluz motoru, který je závislý na zatížení = motor má menší sílu a je tedy snadnější ho přibrzdit. Jednoduchost konstrukce triakového regulátoru je vyvážena ještě nižší účinností motoru.
+ Lze použít třífázový motor na jednofázové síti
+ Nízká cena kondenzátoru (v porovnání s frekvenčním měničem)
– Nižší výkon motoru
– Nelze regulovat rychlost motoru, ani jiné parametry
– Nesymetrické zatěžování sítě (což u malých motorů zase tolik nevadí)


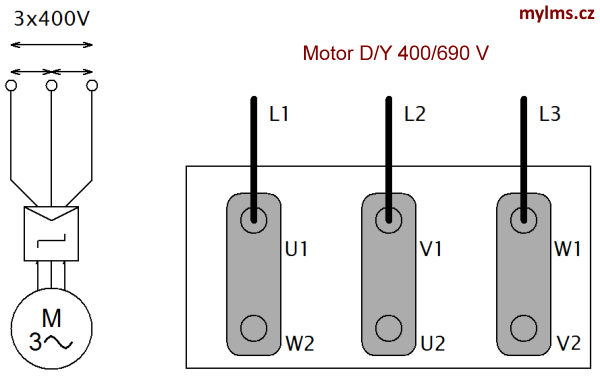
Běžný 3f motor s označením na štítku ΔY 400/690 V
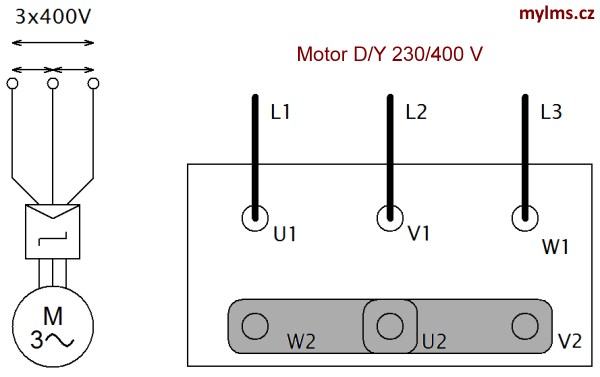
Δ/Y 400/690 V – Tento motor lze přímo připojit k třífázové síti (3×400 V) do konfigurace trojúhelník.
Motor bude fungovat na plný výkon (Δ) při jmenovitém proudu uvedeném na štítku. V případě zapojení do hvězdy bude motor fungovat na podpětí při sníženém výkonu – toho se někdy využívá, pokud je původní motor velmi předimenzovaný a je jeho provoz možný se sníženým výkonem (cca 1/3 štítkového výkonu). Toto zapojení nedoporučuji, protože při zatížení motoru jmenovitým výkonem se motor přetíží a hrozí jeho poškození. Reverzaci otáček lze provést přehozením dvou libovolných přívodních vodičů na svorkovnici motoru, nebo lze použít reverzační přepínač (viz níže).
+ Cena pouze za motor
+ Jednoduché zapojení
+ Plný výkon motoru
+ Snadný rozběh pomocí přepínání hvězda – trojúhelník
– Nelze regulovat rychlost motoru, ani jiné parametry
Δ/Y 400/690 V – U tohoto motoru lze použít přepínač hvězda trojúhelník.
Při zapojení motoru nejprve do hvězdy a následném přepojení do trojúhelníka lze zamezit velkým proudovým nárazům do sítě – touto problematikou se komplexně zabývá článek Přepínaní motoru hvězda – trojúhelník.


Δ/Y 400/690 V – Tento motor lze připojit k třífázové síti (3×400 V) do konfigurace trojúhelník přes třífázový frekvenční měnič.
V tomto zapojení lze měnit otáčky a další parametry motoru. Více informací o zapojení motoru přes frekvenční měnič naleznete v tomto článku.
+ Relativně jednoduché zapojení
+ Plný výkon motoru
+ Lze měnit parametry motoru (otáčky, brzdění, rampy, …)
– Vyšší cena měniče
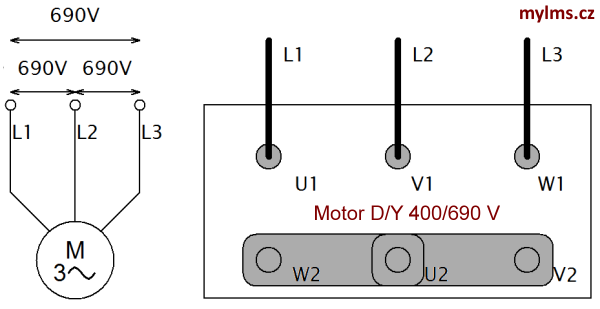
Δ/Y 400/690 V – Tento motor lze připojit k třífázové síti (3×690 V) pouze do konfigurace hvězda.
V opačném případě (připojení k konfiguraci Δ na 690 V) dojde k poškození motoru vlivem přepětí! Motor bude fungovat na plný výkon (Y) při jmenovitém proudu uvedeném na štítku. Reverzaci otáček lze provést přehozením dvou libovolných přívodních vodičů na svorkovnici motoru, nebo lze použít reverzační přepínač (viz níže). Tato síť se obvykle v ČR nevyskytuje.
+ Cena pouze za motor
+ Jednoduché zapojení
+ Plný výkon motoru
– Tato síť se v ČR běžně nevyskytuje
– Nelze regulovat rychlost motoru, ani jiné parametry
Další zapojení těchto motorů nejsou obvyklé. Velké motory (řádově stovky kW až MW) se připojují k frekvenčním měničům s napětím 690 V. Největší motory (řádově MW) se připojují ke speciálním vn frekvenčním měničům, nebo se používají synchronní, nebo stejnosměrné motory.
Motor s více oddělenými vinutími
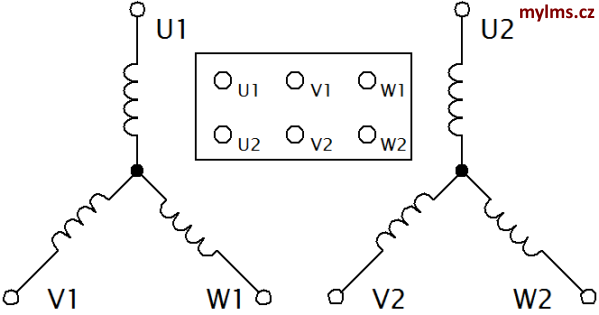
Tento motor má dvoje vinutí s rozdílným počtem pólů; vinutí jsou většinou zapojeny do hvězdy. V podstatě se jedná o dva separátní motory (dvě statorové vinutí) v jednom těle – vinutí jsou namotána ve společných drážkách. Připojením napájení na první tři svorky (U1, V1, W1) se motor roztočí jinou rychlostí než pří připojení napájení na druhé svorky (U2, V2, W2).
Tyto motory se používají tam, kde je potřeba pomocí jednoho motoru docílit více (v drtivé většině dvou) rychlostí, a je zbytečné, nebo nemožné použít převodovku. Výhoda motorů s odděleným vinutím je možnost vyrobit motor, jehož otáčky spolu nemusí „sousedit“ – lze vyrobit motor, který má např. 375 a 3000 otáček. Motory s oddělenými vinutími najdeme třeba u jeřábů, pilek, nebo strojů, kde je potřeba tzv. mikroposuv a nelze použít složitou a velkou převodovku.




Motor s přepínáním Δ – YY (trojúhelník – dvojitá hvězda)
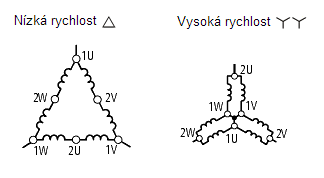
V tomto, tzv. Dahlanderově zapojení je každé vinutí rozděleno na dvě části. Přepínáním cívek ze sériového na paralelní zapojení se počet pólů zmenší na polovinu – zdvojnásobí se otáčky. Motor má při obou otáčkách přibližně stejný výkon.
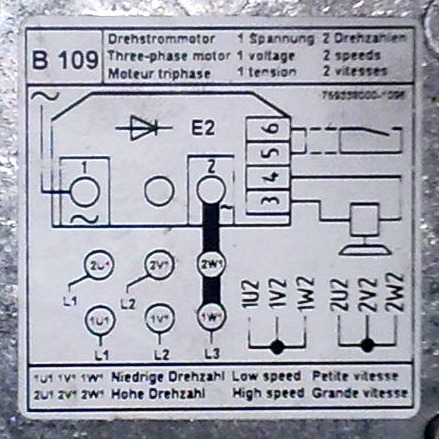
- Zapojení do D – poloviční otáčky
- Zapojení do YY – jmenovité otáčky
Tyto motory se obvykle používají tam, kde je nutné motor spustit s velkým rozběhovým protimomentem (např. velké brusky na plocho). Motor se spustí do trojúhelníka, kde se sice točí pomaleji, ale má větší sílu v rozběhu, po roztočení na jmenovité otáčky se přepne do dvojité hvězdy, kde se jeho otáčky ještě zvýší avšak s nižším momentem, který však již stačí na provoz.
PYY = (2/√3)*PΔ ≈ 1,16 * PΔ


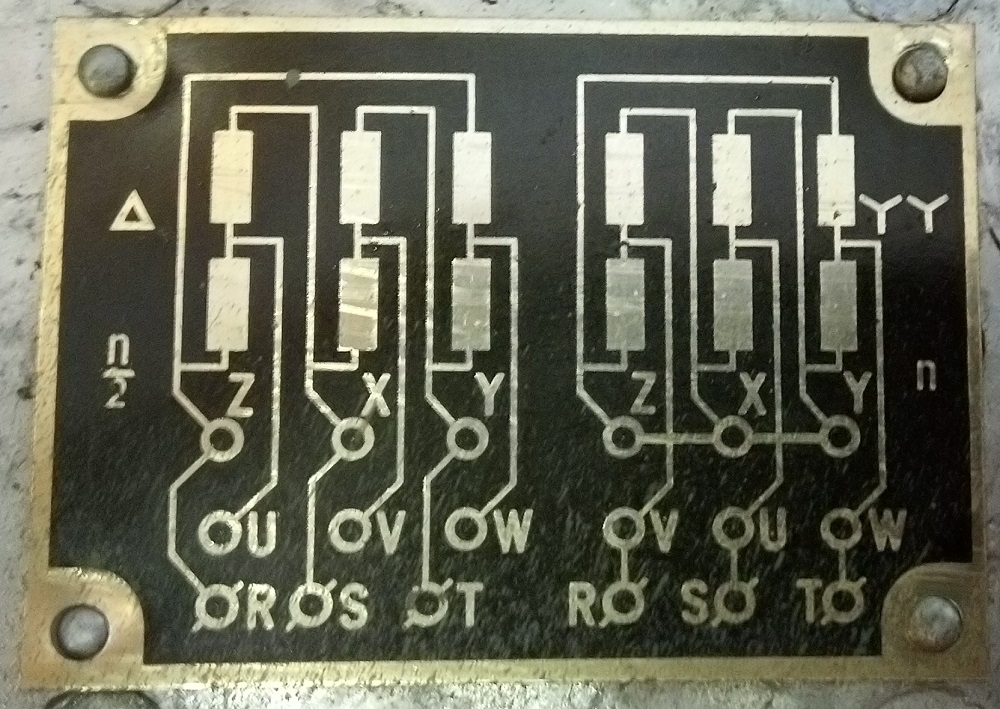
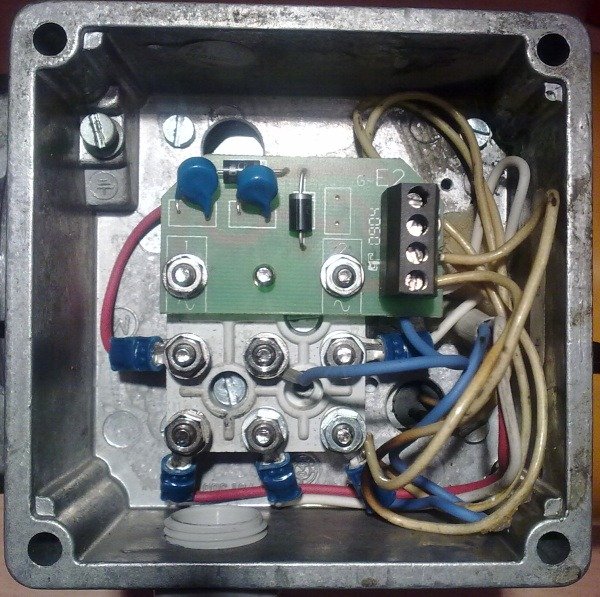
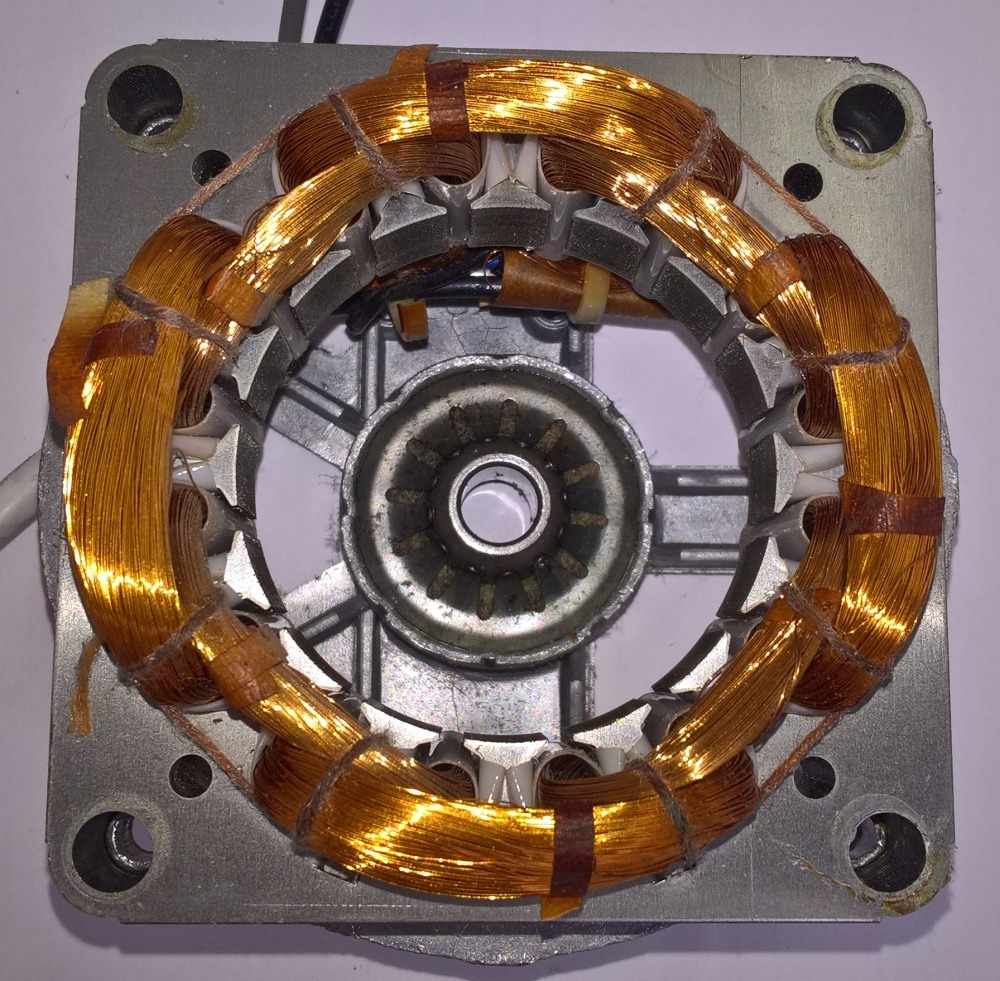
Přívodní svorky (napájení) je na svorkách R-S-T (popis se vztahuje pouze k obrázku svorkovnice výše).
- Při zapojení do D se připojí napájení na svorky X-Y-Z. Svorky U-V-W zůstávají nepřipojeny.
- Při zapojení do YY se napájení připojí na svorky U-V-W a svorky X-Y-Z se pouze spojí dohromady.
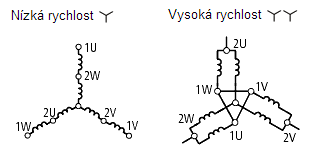
Motor s přepínáním Y – YY (hvězda – dvojitá hvězda)
Též Dahlanderovo zapojení . Podobné jako Δ – YY s tím rozdílem, že při běhu do dvojité hvězdy mají dvojnásobný výkon.
Tyto motory se používají pro pohon ventilátorů. Ventilátor při vyšších otáčkách potřebuje vyšší kroutící moment.
PYY = PY * 2

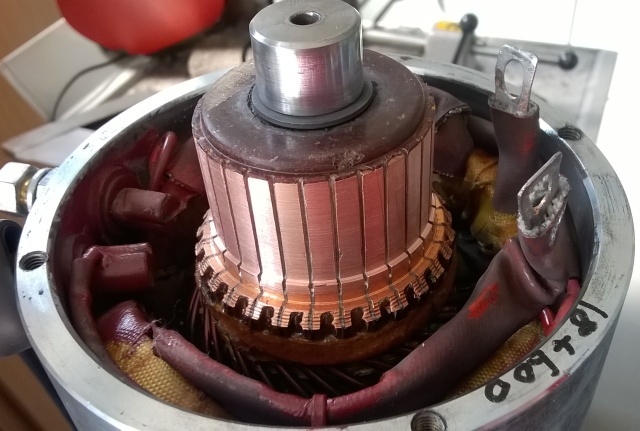
Třífázový asynchronní motor s kroužkovou kotvou – kroužkový motor
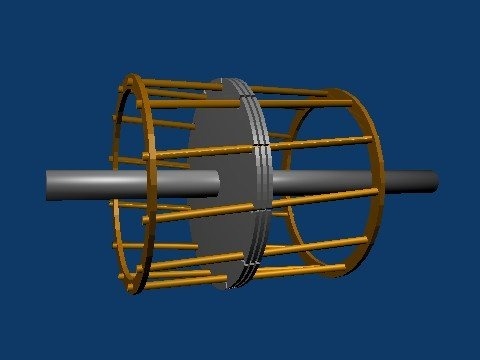
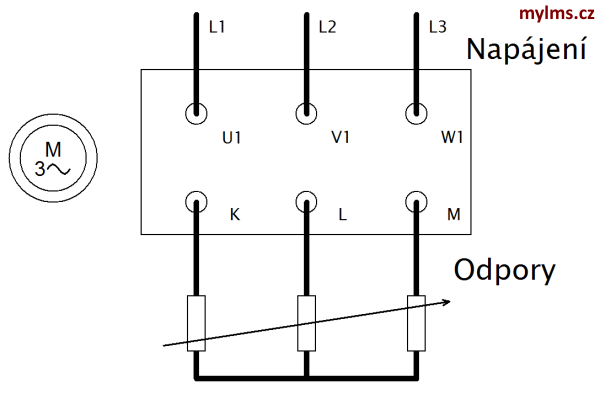
Kroužkový motor má stator stejný jako běžný asynchronní motor. V drážkách rotoru je uloženo vinutí, které není zapojeno nakrátko, ale je vyvedeno na sběrné kroužky (svorky K, L, M). Toto vinutí je většinou zapojeno do hvězdy, výjimečně do trojúhelníka. U motorů větších výkonů může být rotor dvoucívkový (svorky K, L, Q). Z kroužků je vinutí vedeno přes uhlíky (kartáče) na svorkovnici motoru. U větších motorů bývá odklápěč uhlíků, který po roztočení motoru spojí kotvu nakrátko přímo v motoru. Tím se ještě více sníží odpor spouštěče – sníží se ztráty = motor je v podstatě s kotvou nakrátko.
Tyto motory se hlavně dříve používaly kvůli snadnému rozběhu pomocí snižování odporu na rotoru (omezoval se velký proudový náraz do sítě), případně regulaci rychlosti otáčení (skluz). Stator se připojí k síti jako běžný asynchronní motor, rotor se spojí přes činné odpory. Snižováním impedance odporů se motor roztáčí. Při spojení svorek rotoru nakrátko se motor chová jako běžný asynchronní motor s kotvou nakrátko. Dnes jsou tyto motory využívány výjimečně kvůli nutnosti údržby, složitější (dražší) konstrukci a dnes lze regulovat rychlost motoru jednoduše a téměř beze ztrát pomocí frekvenčního měniče.



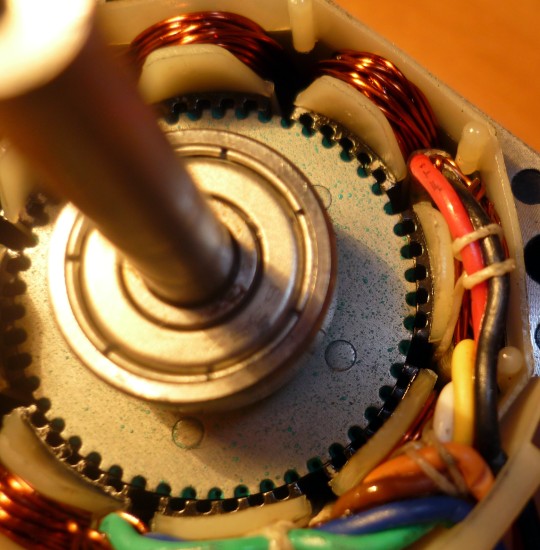
Jednofázový asynchronní motor
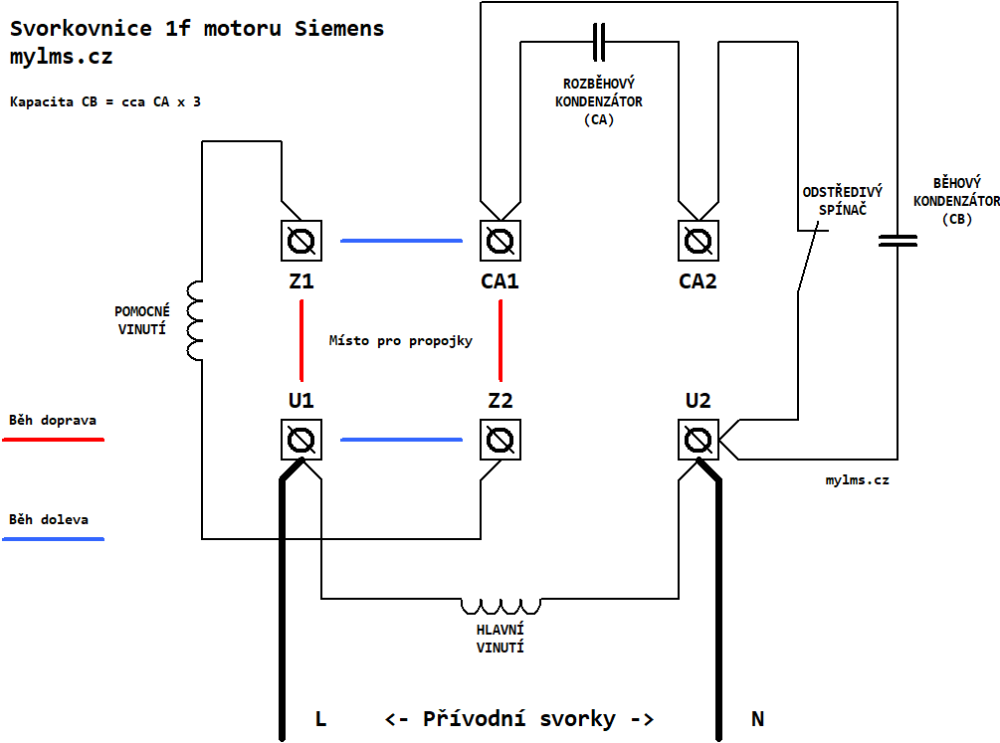
Motor též známý jako motor s rozběhovým (běhovým) kondenzátorem, nebo kondenzátorový motor je jednofázový motor, který má obvykle dvě vinutí. Vinutí hlavní (svorky většinou označeny U1 a U2), které je připojeno přímo na síť, a vinutí pomocné (svorky většinou označeny Z1 a Z2), se kterým je do série zapojen rozběhový kondenzátor (kondenzátor může být nahrazen činným odporem (část vinutí je vinuta bifilárně), nebo stíněným pólem). Kondenzátor způsobí fázový posun, v motoru tedy vznikne točivé magnetické pole.
Pokud je u motoru potřebný vyšší točivý moment při rozběhu, bývají k pomocnému vinutí připojeny kondenzátory dva. Jeden běhový, který je připojen po celou dobu běhu a jeden rozběhový, který se po roztočení motoru odpojí, aby vinutím neprotékal příliš velký proud. Kondenzátory jsou tedy spojeny paralelně, kde rozběhový má cca trojnásobnou kapacitu.
Změna směru otáčení se provede přepólováním směru proudu v pomocném vinutí. Tyto motory jsou konstruovány na konkrétní neměnné otáčky. Ale ty je možné regulovat buď jednofázovým frekvenčním měničem, jednoduchým triakovým regulátorem, nebo předřazenou tlumivkou. Triakový regulátor (a tlumivka) mění napájecí napětí a tedy i skluz motoru, který je závislý na zatížení = motor má menší sílu a je tedy snadnější ho přibrzdit.. Jednoduchost konstrukce triakového regulátoru je vyvážena nižší účinností motoru.






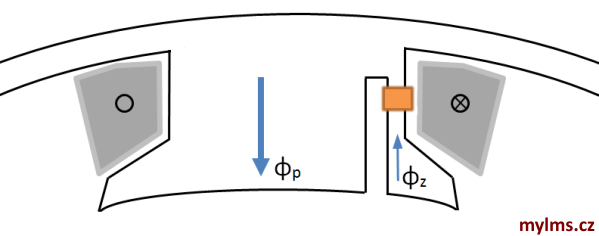
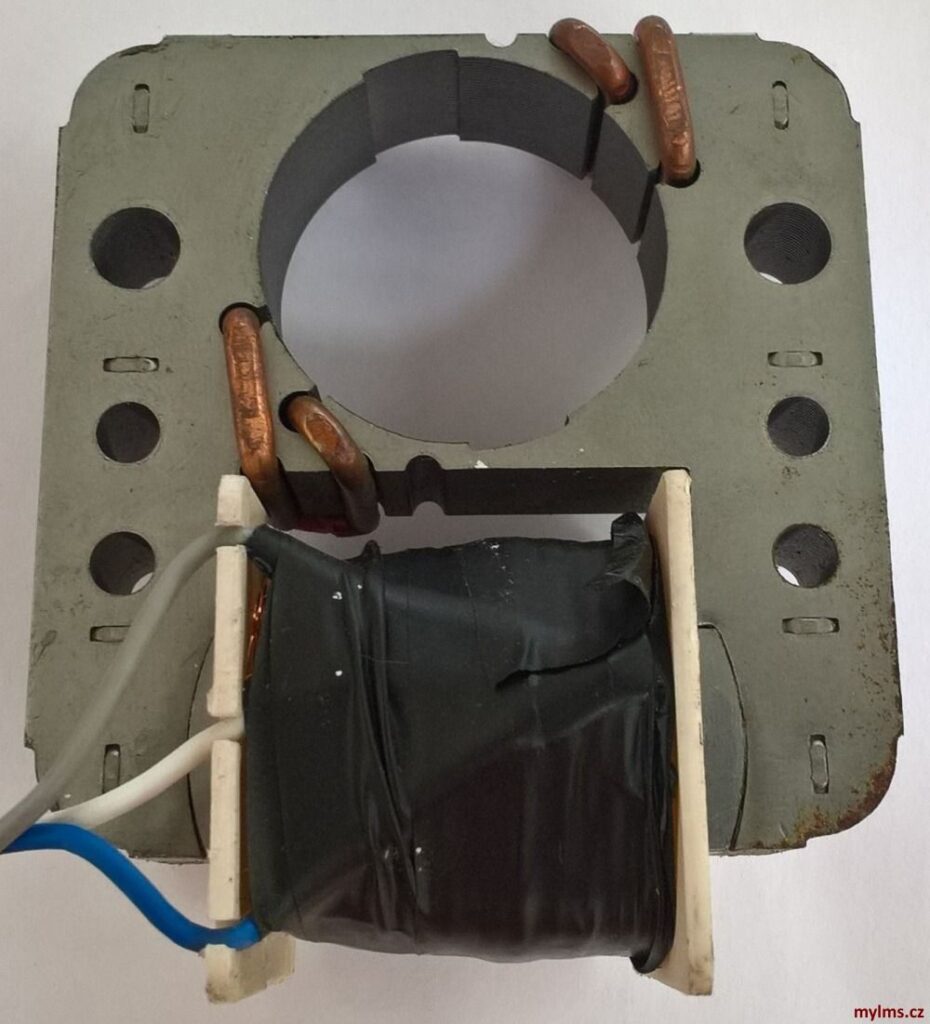
Motory se stíněným pólem mají odlišnou konstrukci statoru. Statorové vinutí (šedě) je navinuto na vyčnívajících pólech, na kterých je výřez, kolem něhož je závit nakrátko (oranžově). Připojením napětí na vinutí se začne indukovat v závitu nakrátko proud, který způsobí magnetický tok opačného smyslu Φz. Celý magnetický tok je tedy deformován k jedné straně – to způsobuje rozběhový moment, který je však malý. Smysl otáčení (který má vždy směr od hlavního pólu ke stíněnému) nelze změnit přepólováním. Tento motor je nejčastěji používán k pohonu ventilátorů (vinutí pak mívá odbočky jejichž přepínáním se mění rychlost otáčení), čerpadel praček a podobných nenáročných aplikacích.







Jednofázové asynchronní motory se používají u malých strojů (přibližně do max. 2 kW), kde většinou není nutné regulovat otáčky, např. ledničky, kotoučové brusky, sekačky, ventilátory, čerpadla apod.
+ Jednoduchá konstrukce
+ Jednoduché zapojení
+ Provoz na 230 V
– Malá účinnost motoru
– Nelze jednoduše regulovat rychlost motoru, ani jiné parametry
Zapojení čerpadla MINOR NTD-62–4-LH-80
Toto dříve často používané teplovodní čerpadlo lze zapojit dvěma způsoby – základní otáčky a snížené otáčky. K čerpadlu je nutné připojit běhový kondenzátor.
Napájecí napětí U: 220 V, 50 Hz
Příkon Pr: 79(65) W
Proud Ir: 0,43(0,34) A
Kondenzátor c: 1,5uF, 400 V ac

Synchronní motor
Synchronní motor má otáčky hřídele stejné, jako je točivé pole ve statoru. Stator motoru má konstrukci stejnou jako běžný asynchronní motor – tedy několik dvojic třífázových vinutí. Konstrukce rotoru se liší – místo klecového vinutí je v rotoru navinut elektromagnet, který je buzený stejnosměrným proudem. Elektromagnet je napájen buď přímo přes sběrné kroužky, nebo má pomocné vinutí a usměrňovač přímo na hřídeli motoru. Rotor se natáčí vždy ve směru magnetického toku rotoru, viz animace níže.
Nevýhodou synchronního motoru je, že se neroztočí při přímém připojení na síť. Magnetické pole statoru jakoby rotoru ujede, proto se pro spouštění motoru používají zvláštní zařízení jako např.
- Roztáčecí motor – motor má na hřídeli asynchronní motor, který ho roztočí na asynchronní otáčky, po připojení na síť se motor synchronizuje se sítí (rozdíl asynchronních a synchronních otáček je malý)
- Pomocné klecové vinutí rotoru – rotor má kromě vinutého rotoru ještě pomocnou klecovou kotvu jako běžný asynchronní motor. Při připojení motoru na síť se motor roztáčí jako běžný asynchronní motor s kotvou na krátko. Po roztočení na asynchronní otáčky se nabudí rotor a motor se synchronizuje. V klecové kotvě se po synchronizaci netvoří žádné magnetické pole, protože motor nemá žádný skluz.
- Frekvenční měnič – Frekvenční měnič plynule zrychluje otáčky magnetického pole statoru, takže se rotor stíhá roztáčet. Tímto řešením lze regulovat i otáčky motoru.
Synchronní motor na rozdíl od asynchronního nereaguje na zvýšený moment na hřídeli snížením otáček, ale pouze natočením magnetického pole rotoru vůči magnetickému poli statoru. Při přetížení se může motor zastavit (magnetické pole statoru rotoru ujede) a už se samovolně neroztočí (podobně jako přetížený krokový motor).

Synchronní reluktanční motor
Rotor tohoto motoru nemá navinutý elektromagnet v rotoru, ale vystouplé póly, které se natáčí tak, aby rotor měl vůči statorovému vinutí co nejmenší magnetický odpor (=reluktance). Tyto motory mají větší účinnost než asynchronní. Jejich otáčky jsou stejné jako frekvence budícího proudu podle vzorce n = (f x 60) / p. Při přímém připojení na síť se neroztočí kvůli velké setrvačnosti rotoru a rychlému magnetickému poli ve statoru. Stejný problém nastane, pokud se motor přetíží – točivé magnetické pole se jakoby „utrhne“ a motor se zastaví. Některé motory mohou mít v rotoru i závit nakrátko, motor se pak roztáčí jako motor s kotvou na krátko a po dosažení otáček se stane synchronní.
Tyto motory lze v podstatě provozovat pouze s frekvenčním měničem. Jejich výhoda je větší účinnost. Myslím, že v těchto motorech je budoucnost – již dnes má spousta pohonů frekvenční měnič. Pouhou náhradou motoru lze zvýšit efektivnost zařízení.
Více na Wikipedii.



Univerzální motor
Univerzální, neboli jednofázový sériový motor je jeden z nejrozšířenějších komutátorových strojů na střídavý proud. Rotor tvoří kotva (rotor s komutátorem) zapojená v sérii se statorem.
Tyto motory mohou pracovat se stejnosměrným i střídavým proudem. Při zapojení na střídavé el. napětí slouží komutátor jako usměrňovač. Při zapojení na stejnosměrné el. napětí slouží komutátor jako střídač. U motorů na střídavý proud musí být stator složen z plechů. Reverzace se provádí přepólováním buď statoru, nebo rotoru. Ne však zároveň.

Tyto motory se používají u dopravních strojů, v elektrické trakci a zejména ve většině ručního nářadí a spotřebičích (vrtačky, brusky, vysavače apod.). Video a obrázky z opravy stejnosměrného komutátorového motoru naleznete v článku Oprava komutátorového motoru.





Krokový motor
Krokový motor je druh synchronního motoru. Krokovému motoru se věnuje samostatný článek.

Vliv snížení tlaku vzduchu, nebo hustoty vzduchu
1. Vliv na pevnost izolačního média Snížení tlaku vzduchu nebo hustoty vzduchu způsobí snížení pevnosti vnější izolace. V rozsahu od nadmořské výšky do 5 000 m se na každých 1 000 m zvýšení průměrného tlaku vzduchu sníží o 7,7~10,5 kPa a pevnost vnější izolace se sníží o 8 až 13 procent.
2. Vliv na průrazné napětí elektrické mezery U navrženého výrobku, protože elektrická mezera je pevná, průrazné napětí bude klesat také s poklesem tlaku vzduchu. Aby bylo zajištěno, že výrobek bude mít dostatečnou odolnost proti průrazu při použití v prostředí s nízkou kapacitou, je nutné zvýšit elektrickou vzdálenost.
3. Vliv na korónu a výbojové napětí
A. Vysoká nadmořská výška a nízký tlak vzduchu snižují počáteční napětí částečného vybití vysokonapěťových motorů, snižují počáteční napětí koróny a způsobují vážnou koroze;
b. Vysoká nadmořská výška a nízký tlak vzduchu snižují vnitřní tlak vzduchu výkonového kondenzátoru, což má za následek snížení počátečního napětí částečného vybití;
C. Vysoká nadmořská výška a nízký tlak vzduchu snižují napětí ve vnitřní dutině svodiče, což má za následek nižší vybíjecí napětí při napájecí frekvenci.
4. Vliv na zhášení elektrického oblouku rozváděče
Snížení tlaku vzduchu nebo hustoty vzduchu sníží výkon zhášení oblouku vzduchového středního zhášecího spínače, sníží kapacitu zapnutí a vypnutí a zkrátí elektrickou životnost.
a) Doba oblouku stejnosměrného oblouku se prodlužuje s rostoucí výškou nebo klesajícím tlakem vzduchu;
b). Oblouková vzdálenost stejnosměrných a střídavých oblouků se zvyšuje s rostoucí nadmořskou výškou nebo snižováním tlaku vzduchu.
5. Chladicí účinek média, tj. vliv zvýšení teploty produktu
Snížení tlaku vzduchu nebo hustoty vzduchu způsobí snížení chladicího účinku vzduchového média. U elektrických výrobků, které jako hlavní metody odvodu tepla používají přirozenou konvekci, nucenou ventilaci nebo vzduchové radiátory, se nárůst teploty zvyšuje v důsledku poklesu kapacity odvodu tepla. V rozsahu od nadmořské výšky do 5000 m se na každých 1000 m zvýšení průměrného tlaku vzduchu sníží o 7,7~10,5 kPa a nárůst teploty se zvýší o 3 až 10 procent.
A. Rychlost nárůstu teploty statických elektrických spotřebičů s rostoucí nadmořskou výškou je obecně v rozmezí 0,4K na 100 m, ale u spotřebičů s vysokým ohřevem, jako jsou elektrické pece, odpory, elektrické svářečky a další elektrická zařízení, zvýšení rychlosti nárůstu teploty s nadmořskou výškou, každých 100 m dosáhne více než 2 K. a
b. Nárůst teploty výkonových transformátorů souvisí se způsobem chlazení s rostoucí nadmořskou výškou. Rychlost nárůstu na 100m je: samochlazení v olejové lázni, {{10}},4 procenta jmenovitého nárůstu teploty; suchý typ samochlazení, 0,5 procenta jmenovitého nárůstu teploty; nucený vítr ponořený do oleje Studený, 0,6 procenta jmenovitého nárůstu teploty; chlazení suchým nuceným vzduchem, 1,0 procenta jmenovitého nárůstu teploty;
C. Rychlost nárůstu nárůstu teploty motoru s rostoucí nadmořskou výškou je 1 procento jmenovitého nárůstu teploty na 100 m.
6. Vliv na mechanickou strukturu a těsnění výrobku
A. Způsobit změny fyzikálních a chemických vlastností porézních materiálů s nízkou hustotou, nízkou koncentrací (jako jsou: elektroizolační materiály, tepelně izolační materiály atd.);
b. Odpařování maziv a urychlení těkání změkčovadel v plastových výrobcích;
C. V důsledku zvýšení vnitřního a vnějšího tlakového rozdílu může plyn nebo kapalina snadno unikat z utěsněné nádoby nebo se zvyšuje rychlost úniku a elektrické výrobky s požadavky na těsnění nepřímo ovlivňují elektrický výkon;